Статья: Идентификация автономного электрогидравлического следящего привода
Автономные электрогидравлические следящие приводы (ЭГСП) с дроссельным регулированием широко применяют в различных отраслях техники. Для выбора оптимального проектного варианта ЭГСП необходимо иметь комплекс проблемно-ориентированных математических моделей. В такой комплекс входят математические модели, описывающие динамику ЭГСП. С помощью этих моделей можно находить показатели качества процессов управления, которые относятся к числу важных критериев при оценке проектных вариантов ЭГСП. В статье на примере одного из распространенных типов автономного гидропривода изложена методика определения вида и параметров математической модели, предназначенной для использования в дальнейшем при решении задачи многокритериальной оптимизации системы с автономным ЭГСП [1].
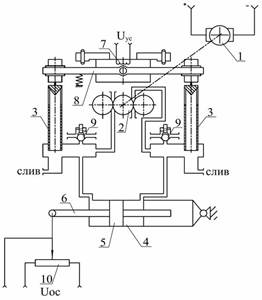
Рис.1
Конструктивная схема рассматриваемого ЭГСП дана на рис.1.[2]. Электродвигатель 1 приводит во вращение трехшестеренный насос 2, который создает потоки рабочей жидкости, направляемой к золотниковым плунжерам 3. В отсутствие подводимого от электронного усилителя сигнала ![]() жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал
жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал ![]() обратной связи от датчика 10 не компенсирует входной сигнал
обратной связи от датчика 10 не компенсирует входной сигнал ![]() . Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3,8 образуют однокаскадный гидроусилитель (ГУ).
. Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3,8 образуют однокаскадный гидроусилитель (ГУ).
Воспользовавшись описанной в [3] методикой, математическую модель ЭГСП можно представить системой уравнений

С начальными условиями (t=0)
![]()
Переменные состояния системы представлены в виде:
![]() ;
; ![]() ;
; ![]() ,
,
где ![]() – ток управления,
– ток управления, ![]() – перемещение золотниковых плунжеров гидроусилителя,
– перемещение золотниковых плунжеров гидроусилителя, ![]() – перемещение штока гидроцилиндра.
– перемещение штока гидроцилиндра.
Остальные величины определяются с помощью приведенных ниже формул:
Значение электрического сигнала ошибки
![]() ,
,
где ![]() – входной сигнал управления ЭГСП.
– входной сигнал управления ЭГСП.
Уравнение сигнала обратной связи
![]() ,
,
где ![]() – коэффициент передачи датчика позиционной обратной связи.
– коэффициент передачи датчика позиционной обратной связи.
Напряжение на выходе электронного усилителя (ЭУ)
![]() ,
,
где ![]() – коэффициент усиления ЭУ.
– коэффициент усиления ЭУ.
Напряжение на входе в обмотки управления ЭМП
 ,
,
где ![]() - сопротивление обмоток ЭМП,
- сопротивление обмоток ЭМП, ![]() - сопротивление выходного каскада электронного усилителя,
- сопротивление выходного каскада электронного усилителя, ![]() – индуктивность электромагнитной части ЭМП.
– индуктивность электромагнитной части ЭМП.
Постоянная времени и коэффициент передачи обмоток управления ЭМП:
 ,
,

Уравнение движения элементов узла управления (УУ):
![]() ,
,
--> ЧИТАТЬ ПОЛНОСТЬЮ <--