Учебное пособие: Організація та ведення розвідки зі спостережних пунктів
39. Зворотну засічку за виміряними кутами (рис. 2.5) виконують по трьох-чотирьох точках (четверту точку використовують для контролю), які обирають так, щоб спостережний пункт знаходився в середині трикутника, отриманого вихідними точками, або поза трикутником, але проти однієї із його вершин.
На місцевості вимірюють кути між напрямками на початкові точки.
Для рішення засічок використовують спосіб Болотова. Для цього на аркуші кальки наколюють точку Р, довільно прокреслюють з неї пряму лінію і послідовно будують кути α, β та γ. Прокреслені напрямки позначають назвою місцевих предметів або зліва направо літерами А, В, С і Д . Після цього кальку накладають на карту та, повертаючи її, суміщають напрямок на кальці з відповідними точками карти (аерознімка). Після суміщення усіх напрямків переколюють основну точку Р з кальки на карту (аерознімок).
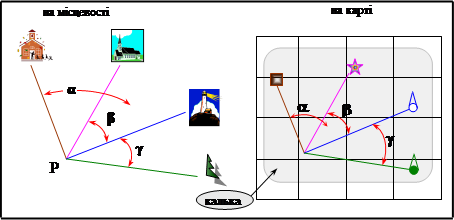
Рисунок 2.5 – Визначення координат зворотною засічкою за виміряними кутами
40. Координати спостережного пункту засічкою за виміряними відстанями (рис. 2.6) визначають у такому порядку:
- зі спостережного пункту вимірюють відстань до трьох точок, положення яких на карті (аерознімку) або їх координати відомі;
- на карті (планшеті, аерознімку) з вихідних точок прокреслюють за допомогою циркуля-вимірювача дуги радіусами, відповідними до виміряних відстаней (в масштабі карти, планшета, аерознімка); пересічення дуг покаже місцезнаходження спостережного пункту.
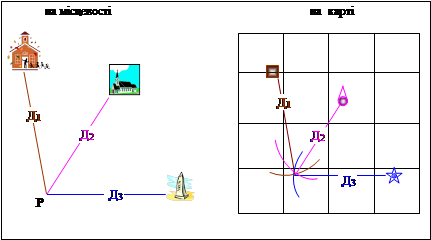
Рисунок 2.6 – Визначення координат за виміряними відстанями
41. При зворотній засічці за виміряними кутами і відстанями на спостережному пункті (рис. 2.7) вимірюють кут між напрямками на дві вихідні точки і відстані до них. Відстані вимірюють за допомогою квантового далекоміру.
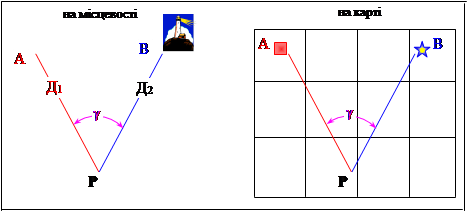
Рисунок 2.7 – Визначення координат засічкою за виміряними відстанями і кутом
Обробку результатів вимірювань проводять на обчислювачі 1В520 або графічним методом. При графічному методі обробки на аркуші кальки наколюють точку спостережного пункту, з неї довільно проводять напрямок і будують кут γ. На відповідних напрямках від точки спостережного пункту відкладають відстані до вихідних точок на кальці. Визначивши місцеположення спостережного пункту прийомами окомірної зйомки, накладають кальку на карту і суміщають вихідні точки на кальці з вихідними точками на карті (аерознімку). Переколюють положення СП з кальки на карту.
42. Визначення координат спостережного пункту ходом (рис. 2.8) проводиться в тих випадках, коли за умовами місцевості зі спостережного пункту не видно жодної контурної точки. Як правило, прокладають висячий хід орієнтованим приладом (бусоллю, теодолітом). При прокладанні ходу потрібно намагатись щоб довжина ходу і число сторін було найменшим.
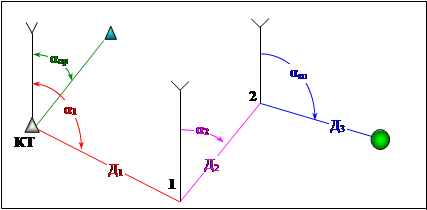
Рисунок 2.8 – Визначення координат висячим ходом
Висячий хід орієнтованим приладом прокладають у такому порядку:
- прилад (бусоль, теодоліт) встановлюють на вихідній точці і орієнтують його за дирекційним кутом;
- наводять прилад на першу точку ходу, знімають значення дирекційного кута напрямку і вимірюють відстань до першої точки ходу;
- переносять прилад на першу точку ходу і орієнтують його в напрямку на вихідну точку за дирекційним кутом зміненим на 30-00, після чого наводять прилад на другу точку ходу, знімають дирекційний кут і вимірюють відстань до другої точки ходу;
- переносять прилад на іншу точку ходу і, зорієнтувавши його в напрямку на першу точку за дирекційним кутом, зміненим на 30-00, наводять на спостережний пункт, знімають дирекційний кут і вимірюють відстань до пункту;
- послідовним рішенням прямих геодезичних задач обчислюють координати точок ходу, а потім координати спостережного пункту.
В тому випадку, якщо вихідна точка для встановлення приладу не доступна, а також при обмеженому часі на проведення топогеодезичної прив'язки, роботи з прокладання ходу починають з першої точки. Встановивши прилад на першій точці і зорієнтувавши його, вимірюють дирекційний кут і відстань до вихідної точки і змінюють значення дирекційного кута на 30-00. В подальшому прокладання ходу виконують у встановленому порядку.
43. При визначенні координат спостережного пункту за допомогою апаратури топоприв'язки апаратура повинна бути завчасно вивірена і підготовлена до роботи.
Робота з апаратурою топоприв'язки включає підготовчі заходи, підготовку апаратури і безпосередньо визначення координат спостережного пункту. До підготовчих заходів відносяться: вибір початкової точки і маршруту руху, визначення дирекційного кута повздовжньої осі машини і координати точки її стояння.
44. Початкову точку обирають з таким розрахунком, щоб довжина маршруту до спостережного пункту не перевищувала 3км, а час руху - 20хв. У тому випадку, якщо довжина маршруту перевищує 3км, то на маршруті руху вибирають контрольні контурні точки і визначають їх координати. При під'їзді до цих точок контролюють точність роботи апаратури топоприв'язки і, при необхідності, вводять коректури осі.
45. Дирекційний кут повздовжньої осі командирської машини (ПРП) визначають за допомогою гірокомпаса, бусолі або раніше відомих дирекційних кутів орієнтирних напрямків.
При визначенні дирекційного кута повздовжньої осі за допомогою гірокомпаса встановленого в командирській машині (ПРП) необхідно:
- підготувати гірокомпас до роботи і визначити істинний азимут повздовжньої осі машин;
- визначити зближення меридіанів (γ) розрахунковим способом, за графіком або по карті;