Дипломная работа: Диплом-Нейросетевая система для управления и диагностики штанговой глубинонасосной установкой
5 — зависимость нагрузки на плунжере насоса от положения балансира СКН.
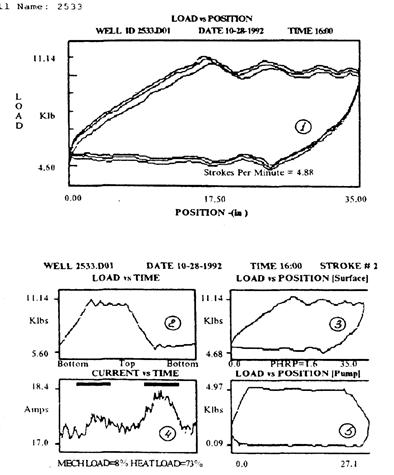
Рисунок 1.2-1 Примеры графиков, получаемых при исследовании скважин с помощью комплексной системы "Анализатор".
Комплекс СТК РНК-ЛЭП.
Система предназначена для телеуправления, телеизмерений и телесигнализации нефтяных скважин и других объектов добычи и первичной переработки нефти. Система в своем составе имеет:
- диспетчерский пункт (ДП);
- станции управления центральные (СУЦ) на распределительных подстанциях напряжением 110-35/6(10) кВ (РП);
- станции управления контролируемых пунктов (СУ КП).
На рисунке 1.2.-2 показано размещение элементов СТК РНК-ЛЭП на объектах нефтепромысла и их взаимодействие с объектами управления.
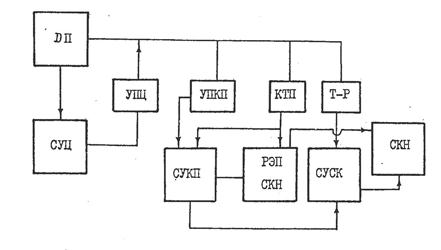
Рисунок 1.2.-1 Схема СТК РНК-ЛЭП
ДП - диспетчерский пункт, СУЦ - станция управления центральная, УПЦ, УПКП - устройства присоединения, КТП, Т-Р - комплектная трансформаторная подстанция, трансформатор, СУКП - станция управления контролируемого пункта, СУ СК - станция управления и защиты СКН при работе без РЭП СКН.
Конструктивно станции управления СТК РНК-ЛЭП представляют собой шкафы, в которых размещены кассеты с блоками. Диспетчерский пункт СТК РНК-ЛЭП оборудован ИЗМ-совместимым компьютером. Станции управления контролируемых пунктов устанавливаются на объектах телеуправления. СУ КП, имеющие проводные линии связи с диспетчерским пунктом НГДУ (СУ РП, КНС и др.), подключаются к ДП непосредственно, удаленные СУ КП подключаются к ЛЭП с помощью конденсаторного устройства присоединения и используют их в качестве физических линий связи с распределительной подстанцией 6(10) кВ (РП) и затем через СУЦ связываются с ДП. Принципиально возможно использование радиоканала для организации связи ДП-СУ КП.
Станции управления центральные на РП 35/6(10) кВ обеспечивают ретрансляцию команд и запросов диспетчерского пункта и ввод сигнала в ЛЭП через устройство присоединения к сборным шинам 6(10) кВ, а также прием и ретрансляцию данных от контролируемых пунктов, подключенных к ЛЭП. Связь ДП-СУЦ - проводная, по выделенной паре или с частотным уплотнением телефонной линии диспетчерской связи с подстанцией 35/6(10) кВ.
Технические возможности станций управления СТК РНК-ЛЭП позволяют осуществлять телесигнализацию и телеуправление (ТС и ТУ):
- станками-качалками (СКН);
- групповыми замерными установками (ГЗУ);
- кустовыми насосными станциями (КНС);
- распределительными подстанциями напряжением 110-35/6(10) кВ, РП),- другими объектами нефтедобычи и первичной переработки нефти. Примером функций ТС и ТУ могут служить следующие: включение, выключение и регулирование скорости качаний головки балансира станка-качалки, контроль потребляемой мощности, формирование ваттметрограммы двигателя, динамограммы станка-качалки, контроль количества откачиваемой жидкости, превышения давления в выкидном трубопроводе, несанкционированного доступа в СУ.
Станции управления КП позволяют оперативному персоналу связаться по телефонному каналу с диспетчером НГДУ. Программные средства СТК РНК-ЛЭП позволяют вести архивы накопленных (контролируемых параметров, ваттметрграмм, динамограмм и др.), составлять отчеты.
Устройство для диагностирования состояния скважинного глубиннонасосного оборудования (патент).
Устройство используется в области нефтедобычи. Предназначено для автоматического сбора, анализа и хранения информации о работе скважин, оборудованных штанговыми глубиннонасосными установками (ШГНУ), а также электроцентробежными насосами (ЭЦН).
Схема устройства для диагностирования состояния скважинного глубиннонасосного оборудования представлена на рисунке 1.2-3
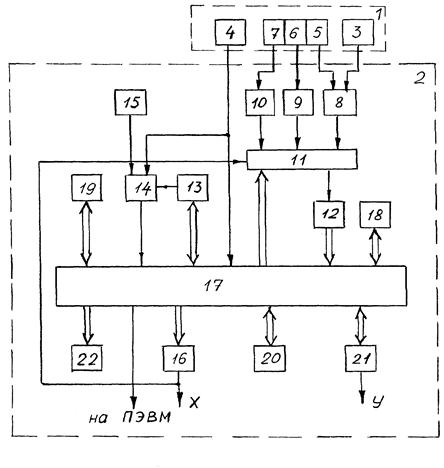
Рисунок 1.2.-3 Схема устройства для диагностирования состояния скважинного глубиннонасосного оборудования.
Для проведения диагностирования технического состояния штанговой глубиннонасосной установки все датчики устанавливают в соответствующем месте на дневной поверхности скважины, выходы датчиков подключают к входу вторичного прибора, на соответствующие тракты измерения блока регистрации 2.
Режим работы устройства выбирают с помощью клавиатуры 18. Запись информации о техническом состоянии ШГНУ производят в течение одного или кратного количества циклов работы установки. Рабочий цикл определяют по интервалу времени между двумя "мертвыми" точками положения балансира ШГНУ.
При снятии динамограммы, характеризующей работу насоса, в блоке регистрации 2 в оперативно-запоминающем устройстве 20 задается область, в которую будет заноситься информация о работе насоса, а также заносятся данные: N куста, N скважины, длина хода и период хода полированного штока. Затем запускают отсчет времени в блоке временной задержки 13, после чего запускают станок-качалку на несколько периодов, полированный шток при этом совершает возвратно-поступательное движение, как следствие - датчики усилия 3 и хода 4 полированного штока начинают формировать сигналы. По истечении времени задержки, после того, как ШГНУ вошла в установившийся режим работы, автоматически или с дистанционного пульта оператора запускается режим измерения, и сигнал с датчика усилий 3 поступает на усилитель 8 и далее через мультиплексор 11, который осуществляет коммутацию имеющихся аналоговых сигналов, - на вход аналого-цифрового преобразователя 12, а с него - на порт микропроцессорного контроллера 17. В это же время сигнал с датчика положения 4 также поступает на вход микропроцессорного контроллера 17 и на вход блока запуска измерений 14. При этом датчик положения 4 установлен на полированном штоке станка-качалки таким образом, чтобы синхронизирующий сигнал запуска измерения микропроцессорного контроллера 17 вырабатывался в блоке запуска измерений 14 только тогда, когда канатная подвеска находится в крайнем нижнем положении. По этому сигналу контроллер 17 начинает измерять время одного качания и усилие между траверсами подвески штанг. Обработка постоянно поступающей в цикле измерения информации о времени и усилии осуществляется в контроллере 17 в соответствии с заданной программой, поступающей из программного блока управления 19. После прихода с датчика положения второго синхронизирующего сигнала по цепи датчик положения 4 - блок запуска измерений 14 - контроллер 17 - генератор 16 синусоидальных колебаний информация автоматически выводится на графический индикатор 22, заносятся в память оперативно-запоминающего устройства 20 все необходимые уровни нагрузок и единичная динамограмма. При этом развертка динамограммы по оси X осуществляется по сигналу с генератора синусоидальных колебаний 16, период колебаний которого соответствует периоду одного качания. На экране графического индикатора 22 отображается одиночная динамограмма (фиг. 2), по которой определяют вес штанг Pшт , вес штанг плюс жидкости Pш+ж , минимальный (Pmin ) и максимальный (Pmax ) вес штанг, а также длину хода. Значения нагрузок в цифровом виде заносятся в протокол промысловых испытаний с фактическими нагрузками за период одного цикла. По полученной одиночной динамограмме в соответствии с программой, заданной программным блоком управления 19, автоматически прямо на скважине рассчитываются величина среднего дебита, утечки в клапанах насоса, производительность насоса.
Системы контроля за состоянием глубинно-насосного оборудования " СИДДОС".