Дипломная работа: Исследование динамических характеристик электроприводов постоянного тока при различных способах возбуждения
Решение этой проблемы базируется на разделении (декомпозиции) системы в пространстве и во времени, с обоснованным выбором на каждом шаге определённой модели, а иногда и отдельного прикладного пакета. Задачи проектирования полупроводникового электропривода с достаточной точностью решаются в пакете MatLab, Simulink. Поэтому он и выбран в качестве средства моделирования в дипломной работе.
1. Основные понятия термины и определения
Электропривод (рис. 1.1) – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной посредством механической передачи (редуктор (Р) с рабочим механизмом (РМ), силового преобразователя (СП), системы управления (СУ), блока сенсорных устройств (БСУ), которые обычно играют роль датчиков обратной связи по основным переменным состояния электропривода, вторичных источников питания (ВИП), обеспечивающих напряжение питания СУ, БСУ и входных цепей СП, и источника электрической энергии (ИЭЭ).
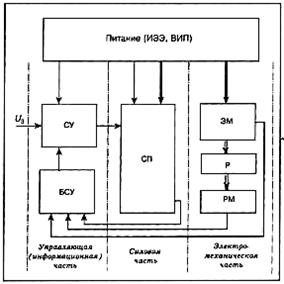
Рисунок 1.1. Блок-схема электропривода.
В качестве СП в дальнейшем рассматриваются лишь силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических параметров источника электрической энергии (напряжение, частота) с электрическими параметрами электрической машины и, во-вторых – регулирование электрических параметров машины. Известно, что для управления скоростью вращения и моментом электрической машины необходимо регулировать электрические параметры на её входе. Система управления (СУ) предназначена для управления СП, она обычно строится на микросхемах либо микропроцессоре. На вход СУ подается сигнал задания U з и сигналы отрицательных обратных связей от БСУ. Система управления, в соответствии с заложенным в нее алгоритмом, вырабатывает сигналы управления СП, управляющего электрической машиной.
Следует оговорить некоторые особенности терминологии, касающиеся электрических машин. Электрической машиной будем называть обобщенный электромеханический преобразователь, обеспечивающий преобразование электрической энергии в механическую при работе в двигательном режиме, механической – в электрическую при работе в генераторном режиме, а также обеспечивающий преобразование электрической и механической энергии в тепловую при работе в режиме электромагнитного тормоза. В электроприводах в переходных и квазиустановившихся режимах все эти процессы преобразования имеют место. Однако, отдавая дань традиции, часто для электропривода будет использоваться термин электрический двигатель. При этом читатель должен понимать, что речь идет об электрической машине.
Электроприводы делятся:
· по характеру движения – на вращательный электропривод и линейный электропривод;
· по направлению движения – на реверсивный электропривод, обеспечивающий вращение (движение) в обоих направлениях, и нереверсивный, обеспечивающий движение только в одном направлении;
· по электрическим параметрам электрической машины – на электропривод постоянного тока и электропривод переменного тока;
· по электрическим параметрам источника электрической энергии – на электропривод, питающийся от промышленной сети 50 Гц и электропривод, питающийся от автономного источника питания (аккумулятор, солнечная батарея, дизель-генератор и т.д.);
· по принципу действия – на электроприводы непрерывного действия, подвижные части которого в установившемся режиме находятся в состоянии непрерывного движения, и дискретный электропривод, подвижные части которого находятся в состоянии дискретного движения в установившемся режиме;
· по соотношению между числом электрических машин и рабочих механизмов – на групповой электропривод, обеспечивающий движение нескольких рабочих механизмов от одной электрической машины, и индивидуальный, обеспечивающий движение одного рабочего механизма от одной электрической машины.
Наиболее совершенным электроприводом является автоматизированный электропривод – регулируемый электропривод с автоматическим регулированием переменных состояния (момента и скорости).
Автоматизированные электроприводы делятся на:
· стабилизированный по скорости или моменту электропривод;
· программно управляемый электропривод, осуществляющий перемещение рабочего механизма в соответствии с программой, заложенной в сигнал задания;
· следящий электропривод, осуществляющий перемещение рабочего механизма в соответствии с произвольно изменяющимся входным сигналом;
· позиционный электропривод, предназначенный для регулирования положения рабочего механизма.
1.1 Приведение переменных и параметров рабочего механизма к валу исполнительного двигателя
Исполнительный двигатель электропривода связан с рабочим механизмом через механическую передачу. На рис. 1.2 представлено несколько типов механических передач.
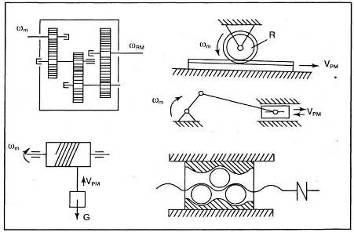
Рисунок 1.2. Типы механических передач в электроприводе
Механическая часть электропривода в дальнейшем рассматривается в качестве «жесткой» механической модели. Это значит, что все звенья модели в процессе передачи момента не деформируются, кинематические пары не имеют люфтов и зазоров, а потери в механической передаче учитываются только её коэффициентом полезного действия.
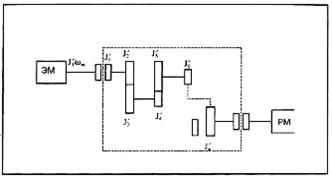
Рисунок 1.3. Функциональная схема «жесткой» механической передачи
В этом случае динамические и статические моменты рабочего механизма могут быть пересчитаны и приведены к валу исполнительного двигателя. На рис. 1.3 представлена функциональная схема «жесткой» механической части электропривода. Уравнение движения в этом случае имеет известный вид:
![]() (1.1)
(1.1)