Дипломная работа: Исследование динамических характеристик электроприводов постоянного тока при различных способах возбуждения
– момент сопротивления нагрузки, приведенный к валу двигателя,
![]() угловая скорость вращения вала двигателя,
угловая скорость вращения вала двигателя,
![]() – момент инерции, приведенный к валу двигателя,
– момент инерции, приведенный к валу двигателя,
М’ – собственный момент сопротивления двигателя,
МР – момент сопротивления редуктора,
МРМ – момент сопротивления рабочего механизма,
J’, JP , JPM – моменты инерции двигателя, редуктора и рабочего механизма,
![]() – передаточное число и коэффициент полезного действия редуктора.
– передаточное число и коэффициент полезного действия редуктора.
При этом ![]() в случае вращающегося рабочего механизма, и
в случае вращающегося рабочего механизма, и ![]() в случае линейно перемещающегося рабочего механизма.
в случае линейно перемещающегося рабочего механизма.
Часто при расчетах моментами сопротивления двигателя и редуктора пренебрегают и учитывают только приведенный момент рабочего механизма. Как правило, нагрузочный момент является случайной величиной. Точное его определение возможно лишь при статистической обработке результатов измерений на реальном объекте. Тем не менее все разнообразие нагрузок можно систематизировать по характеру изменения момента от скорости либо от угла поворота рабочего механизма и представить в виде типовых зависимостей.
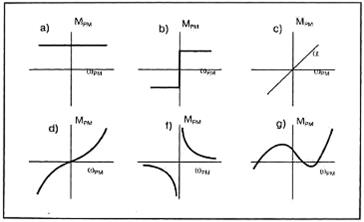
Рисунок 1.4. Типовые зависимости нагрузочного момента
Типовые зависимости МРМ = f (wРМ ) представлены на рис. 1.4.
При этом нагрузочный момент![]() имеет тот же вид, что и момент рабочего механизма.
имеет тот же вид, что и момент рабочего механизма.
а) Наиболее простым видом нагрузочного момента, удобным для аналитического решения задачи выбора двигателя, является постоянный момент, не зависящий от параметров ни по значению, ни по знаку: Мн = const. Классическим примером такого вида нагрузки является подъём или спуск груза. Близок к этому момент, создаваемый в системе регулирования скорости движения лентопротяжных механизмов и намоточных устройств с постоянным натягом ленты, провода и т.п.
б) Другим видом нагрузочного момента является момент сухого трения, неизменный по значению, но приложенный навстречу направлению вращения (скорости) Мн = МH sign(wm ). В следящих системах и в станочных электроприводах подачи этот вид нагрузки является основным.
Кроме того, приводы вентилей, дросселей, клапанов в системах автоматического регулирования температуры, расхода газа и жидкости, винтов кареток некоторых станков, щеток потенциометров и т.п. устройств характеризуется прежде всего моментом сухого трения.
В общем случае момент сухого трения не остаётся постоянным, а сложным образом зависит от скорости перемещения. Кроме того, в механизмах, длительно находящихся в покое или в особых средах (например, в вакууме), наблюдается эффект залипания, при котором сопротивление начальному движению возрастает в несколько раз.
с) Моментом вязкого трения называют нагрузочный момент ![]() .
.
d) Зависимость нагрузочного момента от угловой скорости, например, вентилятора, центробежного насоса, гребного и воздушного винта, имеет вид, показанный на рис. 5, d. Такой нагрузочный момент описывают формулой ![]() , где n= 1,72÷ 2,5, и называют вентиляторным.
, где n= 1,72÷ 2,5, и называют вентиляторным.
e) Часто нагрузочный момент зависит от угла поворота механизма а и его положения. Такой момент называют позиционным. Характерной нагрузкой является радиолокационная антенна, момент сопротивления которой зависит от её положения относительно направления ветра. Поэтому в некотором диапазоне углов поворота механизма позиционный момент может принимать отрицательные значения, то есть помогать двигателю вращать антенну. К этому же типу механизмов относятся приводы рулей летательных аппаратов, момент сопротивления которых зависит от угла отклонения руля в шарнире и называется шарнирным.
f) В системах автоматики, где определяющую роль играют переходные процессы (разгон, торможение), основным моментом, нагружающим двигатель, является динамический момент![]() .Характерными динамическими нагрузками являются различного вида следящие системы (стрелково-пушечные турели, приводы копировально-фрезерных станков, приводы радиолокационных антенн и т.п.).
.Характерными динамическими нагрузками являются различного вида следящие системы (стрелково-пушечные турели, приводы копировально-фрезерных станков, приводы радиолокационных антенн и т.п.).
1.2 Основные характеристики и параметры электропривода
Различают три вида основных характеристик электропривода:
· статические характеристики;
· энергетические характеристики;
· динамические характеристики.
Статические характеристики
Это характеристики при установившемся режиме работы ЭП, когда скорость на выходе постоянна. В этом случае, как это следует из основного закона движения (1.1), момент, развиваемый двигателем на валу (M ), равен приведенному моменту нагрузки (Мн ).