Дипломная работа: Измеритель коэффициента шума
Рисунок 4.1 - Структурная схема калибровки измерительного тракта
При этом напряжение на входе АЦП изменяется от величины
![]() (4.1)
(4.1)
до величины
![]() (4.2)
(4.2)
где ![]() - коэффициент передачи по мощности измерительной схемы от входа ИКШ до выхода детектора;
- коэффициент передачи по мощности измерительной схемы от входа ИКШ до выхода детектора;
![]() - приведенная к входу температура шума ИКШ;
- приведенная к входу температура шума ИКШ;
![]() - коэффициент пропорциональности.
- коэффициент пропорциональности.
По сигналам α1 и β1 происходит определение коэффициента шума ИКШ
![]() (4.3)
(4.3)
где ![]() - избыточная относительная температура генератора шума.
- избыточная относительная температура генератора шума.
Далее присоединяется исследуемое устройство между выходом ГШ и входом измерителя и проводится измерение его характеристик (рисунок 4.2).
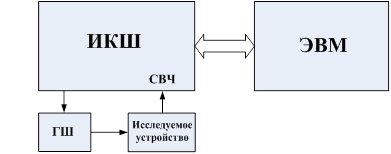
Рисунок 4.2 - Структурная схема измерения КШ и КП четырехполюсников
На этапе измерения (рисунок 4.2) в зависимости от того выключен генератор шума или включен, напряжение на входе АЦП изменяется от величины
 (4.4)
(4.4)
до величины
 (4.5)
(4.5)
После этого происходит определение искомых параметров ![]() и
и ![]() в соответствии с формулами:
в соответствии с формулами:
![]() (4.6)
(4.6)
![]() (4.7)
(4.7)
В случае если коэффициент усиления приемного устройства (ПУ) достаточно высок, так что можно пренебречь шумами ИКШ, то измерения производят без калибровки, сразу определяя коэффициент шума ПУ, который равен
![]() , (4.8)
, (4.8)
где α2 и β2 - величины, определяемые по (4.4) и (4.5).
Одним из основных качеств современных ИКШ является высокая автоматизация процесса измерения на базе вычислительной техники. Основную роль в автоматизации процесса измерения, управления работой и обработки результатов в ИКШ выполняют микропроцессоры и ЭВМ. Применение в приборах микропроцессоров позволило за счет замены аппаратных средств программными принципиально изменить процесс измерения, расширить функциональные возможности ИКШ, автоматизировать ряд трудоемких операций по проведению подготовительных настроек, обработке результатов измерений, а также упростить электрические схемы. Расширение функциональных возможностей ИКШ выразилось в том, что одним прибором, удается реализовать все измерительные задачи.
Микропроцессор в приборе выполняет следующие основные функции:
· производит автоматический выбор пределов измерений;
· выполняет автоматическое управление процессом измерения (устанавливает необходимый для измерения уровень входных сигналов, управляет работой отдельных узлов измерительного тракта и др.);
· автоматически перестраивает встроенный в прибор гетеродин либо в заданном оператором диапазоне частот, либо на частоту, на которой должны производиться измерения;