Дипломная работа: Контейнерный козловой кран
1. Комплексная механизация железнодорожного контейнерного склада
В данном проекте рассмотрена комплексная механизация железнодорожного склада. Высокая степень автоматизации погрузо-разгрузочных работ данного склада стала возможной в связи с тем, что грузы на нем хранятся в крупнотоннажных контейнерах.
Контейнеры представляют собой стандартизованные по внешним и внутренним габаритам и местам расположения захватных приспособлений хранилища для грузов. По углам контейнеров размещены специальные элементы – фитинги, используемые как опоры контейнеров при их штабелировании и как элементы для захвата контейнеров при их перегрузке.
В связи с тем, что крупнотоннажные контейнеры массой брутто 10 т (1Д) и 25 т (1ВВ, 1В) в СНГ, как правило не применяются, при автоматизации железнодорожного склада будем исходить из того, что весь грузооборот на нем происходит в контейнерах массой 32 т (1А) и 20 т (1С).
Так как грузооборот склада тесно связан со временем выполнения погрузочно-разгрузочных операций, то целью автоматизации является уменьшение времени на их проведение и как следствие увеличение грузооборота склада и получения максимальной прибыли от использования складских площадей. Кроме того, целью автоматизации является удаление из зоны погрузочно-разгрузочных работ обслуживающего персонала для предотвращения производственных травм.
В качестве средства автоматизации склада в ходе дипломного проекта был выбран козловой контейнерный кран, целесообразность применения которого обоснована большой площадью склада, что усложняет применение наземных погрузчиков. Кроме того, это позволяет увеличить емкость склада за счет складирования контейнеров в 2 яруса и уменьшения промежутков между контейнерами в связи с отсутствием необходимости оставлять проезды для погрузчиков.
В качестве грузозахватного устройства в кране предложено применить специальное грузозахватное приспособление – спредер. Спредер осуществляет автоматическое сцепление и расцепление с контейнером без участия стропальщика. При опускании спредера на контейнер Т – образные штыри заходят в отверстия фитингов и поворачиваются на 90 градусов, осуществляя сцепление спредера с контейнером. После транспортировки контейнера штыри возвращаются в исходное положение, освобождая контейнер.
Для точного наведения спредера на контейнер зазват выполнен поворотным. Кроме того, предусмотрена возможность работы с несколькими типами контейнеров. При необходимости смены типоразмера контейнера вместо контейнера 1С спредер производит захват рамы для работы с контейнером 1А и производится подключение к этой раме электрических разъемов для работы механизмов поворота штыков.
Козловой контейнерный кран выполнен с двумя консолями грузоподъемность, на которых ограничена контейнерами 1С, что удешевляет конструкцию и в тоже время не сказывается на работе склада, так как под контейнеры 1А остается достаточно складского места между опорами крана. В тоже время опоры крана выполнены таким образом, что контейнеры 1С проходят сквозь них без поворота захвата, что ускоряет проведение погрузочно-разгрузочных работ.
2. Краткое описание проектируемого козлового крана
Проектируемый кран – контейнерный козловой кран, предназначенный для обслуживания железнодорожного контейнерного склада, полностью заполненного грузовыми контейнерами, причем половина из них массой 20т, а другая половина – массой 32т. в течение рабочей смены типоразмер перегружаемых контейнеров изменяется, в среднем, четыре раза в день.
Все элементы металлоконструкции – коробчатого сечения. Пролетное строение состоит из 2-х главных и 2-х концевых балок, опирающихся на 4 опоры, соединенные между собой попарно стяжками. Механизм передвижения крана состоит из балансиров и восьми ходовых тележек, собранных попарно под каждой опорой и имеющих индивидуальный привод.
Грузовая тележка представляет собой сварную раму, установленную на четырех двухребордных приводных колесах и перемещающуюся по мосту крана. На раме тележки козлового крана размещается механизм подъема и механизм передвижения тележки.
Механизм подъема представляет собой двухбарабанную лебедку.
Механизм передвижения грузовой тележки состоит из двух приводов: один привод – на каждую пару ходовых колес.
Расстояние по горизонтали между осями рельсов кранового пути называется – пролетом крана, а расстояние между осями ходовых колес или между осями балансирных тележек – базой крана. Расстояние между продольными осями подтележечных рельсов называется колеей тележки. Пролет проектируемого крана 25000 мм, а база 14000 мм. Колея тележки 13500 мм, а база 2500 мм.
3. Расчет механизма подъема
3.1 Исходные данные
1. Грузоподъемность, кг ![]()
2. Масса захвата, кг ![]()
3. Скорость подъема, м/с ![]()
4. Кратность полиспаста ![]()
5. Число ходовых колес ![]()
6. Число приводных колес ![]()
7. Группа режима работы 4
3.2 Выбор кинематической схемы механизма и схемы запасовки каната
Кинематическая схема механизма подъема крана представлена на рис. 1.
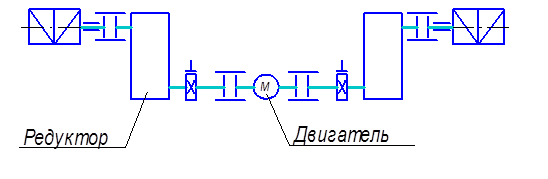
Рис. 1
Схема запасовки каната представлена на рис. 2.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--