Дипломная работа: Конвертирование исходного текста программ для станков с ЧПУ из одной системы программирования в другую
Выходной информацией задачи является файл *.тхт обработанный заданным методом обработки.
2.1.4. Математическая простановка задачи
Следует отметить, что вся машинная арифметика основывается на декартовой системе координат, где X, Y, Z– основные программные координаты, I, J, K– дополнительные (при расчёте круговой интерполяции и заходов на эквидистанту обрабатываемого контура). Координата A – поворотное устройство.
Рис. 2.1
2.1.4.1. Математическая постановка задачи ПК – Маяк
Расчёт радиусов по G2, G3 (круговой интерполяции)
Эта задача предназначена для пересчёта круговой интерполяции и заходов на эквидистанту контура детали.
Алгоритм расчёта радиусов основан на расстоянии удаления точки центра радиуса от начальной точки радиуса (в относительной системе исчисления) и от ноля детали до центра радиуса (в абсолютной системе исчисления).
На рис. 2.2 изображен эскиз обрабатываемой детали (контура).
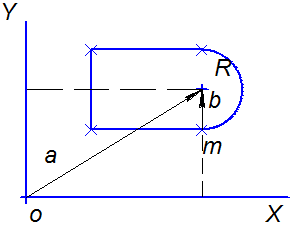
Рис. 2.2
Линии aи bотображают разницу расчётов радиусов при программировании системы Вм и Маяк.
Линия со стрелкой a система Маяк (абсолютная система).
Линия со стрелкой b система Вм (относительная система).
Формула пересчёта радиусов.
I – значение Iкоординаты в обрабатываемом кадре.
J – значение Jкоординаты в обрабатываемом кадре.
X_pred – значение координаты Xв предыдущем кадре.
Y_pred – значение координаты Yв предыдущем кадре.
I = X_pred + I;
J = Y_pred + J
Результаты приведены в таблице 2.
Таблица 2
Результаты обработки
| Входные данные | Выходные данные |
|
N1 G0 X0 Y0 N1 X10 Y10 F100 N1 G42 D30 X17.59 Y18.83 N1 G1 X47.59 N1 G3 X47.59 Y40.83 I0 J11 N1 G1 X17.59 |
N1G0X0Y0 N2X10.Y10.F100 N3G42D30X17.59Y18.83I30.J0 К-во Просмотров: 604
Бесплатно скачать Дипломная работа: Конвертирование исходного текста программ для станков с ЧПУ из одной системы программирования в другую
|