Дипломная работа: Конвертирование исходного текста программ для станков с ЧПУ из одной системы программирования в другую
N5X17.59
N6Y18.83
N7X47.59
Как видно из таблицы кадры №2, 3, 4 изменились в результате обработки
Расчёт заходов по радиусу на эквидистанту контура детали по G41 G42
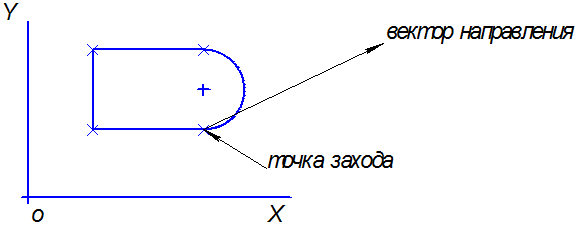
Рис 2.4
Расчёт захода на радиус несколько отличается от захода на линейный размер. Здесь немало важную роль играет вектор направления в зависимости от четверти, на которую направлен вектор рис.2.5.
Формулы:
J_nast – значение Jв обрабатываемом кадре.
J_sled – значение Jв следующем кадре.
I_nast – значение Iв настоящем кадре.
I_sled – значение Iв следующем кадре.
Y_nast – значение Yв настоящем кадре.
X_nast – значение Xв настоящем кадре.
Iи J – служат для определения знака в выражении.
С начала рассчитываем значение (Iи J) из следующего кадра.
Логическое решение задачи
Если G3, то проверяем значение заданных координат:
Если I_sled > 0 и J_sled >= 0, то I = 1, J = -1;
Если I_sled < 0 и J_sled <= 0, то I = -1, J = 1;
Если I_sled < 0 и J_sled >= 0, то I = 1, J = 1;
Если I_sled > 0 и J_sled <= 0, то I = -1, J = -1
Если G2, то проверяем значение заданных координат:
Если I_sled > 0 и J_sled >= 0, то I = -1, J = 1;
Если I_sled < 0 и J_sled <= 0, то I = 1, J = -1;
Если I_sled < 0 и J_sled >= 0, то I = -1, J = -1;
Если I_sled > 0 и J_sled <= 0, то I = 1, J = 1
Следующее операция описана формулами:
I _ nast = Y _ nast + J _ sled