Дипломная работа: Модель портального манипулятора
или через проекции на оси неподвижной системы осей в виде
| (1.12) |
По аналогии с ![]() введем вектор угловой скорости звена
введем вектор угловой скорости звена
| (1.13) |
и запишем равенство (1.6) в развернутой форме для случая, когда звенья манипулятора обладают симметрией относительно главных осей инерции. Для этого подставим выражения ![]() ,
, ![]() ,
, ![]() из (1.7), (1.11), (1.13) в (1.6) и получим
из (1.7), (1.11), (1.13) в (1.6) и получим
| (1.14) |
При использовании вектора скорости центра инерции в форме (1.14) выражение
| (1.15) |
с учетом которого равенство (1.4) принимает вид
 . . | (1.16) |
Построение динамической модели переходных процессов манипулятора МРЛ-901П
Модель переходных процессов в манипуляторе МРЛ-901П
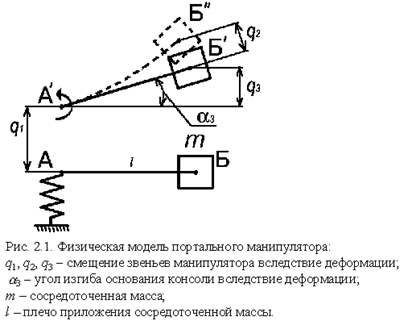
Модель портального манипулятора МРЛ-901П представлена на рис. 2.1. Деформирующимися элементами в манипуляторе являются: зубчатый ремень, обозначенный пружиной; консольная часть, на которой имеется сосредоточенная масса m . Деформация поперечной консоли обозначена на схеме углом ![]() . Исходными данными для расчета такой модели будут: значение подвижной массы m , плечо приложения этой массы l , а также коэффициент натяжения зубчатого ремня, определяемый как отношение прогиба ремня к его длине и влияющий на жесткость, и демпфирование модуля линейного перемещения.
. Исходными данными для расчета такой модели будут: значение подвижной массы m , плечо приложения этой массы l , а также коэффициент натяжения зубчатого ремня, определяемый как отношение прогиба ремня к его длине и влияющий на жесткость, и демпфирование модуля линейного перемещения.
При остановке электроприводов подвижные массы будут продолжать движение под действием инерционных сил, в результате чего точки А и Б займут положение ![]() и
и ![]() соответственно, затем остановятся и под действием сил упругой деформации пружины и балки начнут совершать колебательное движения.
соответственно, затем остановятся и под действием сил упругой деформации пружины и балки начнут совершать колебательное движения.
Рассматриваемая модель имеет три степени свободы, обозначим независимые обобщенные координаты как ![]() ,
, ![]() и
и ![]() . Для описания данной модели воспользуемся уравнением Лагранжа второго рода:
. Для описания данной модели воспользуемся уравнением Лагранжа второго рода:
 (j = 1,2,…,k ), (j = 1,2,…,k ), | (2.1) |
где T - кинетическая энергия системы; Q - обобщенная сила; k - количество степеней свободы.
Кинетическая энергия системы с тремя степенями свободы является однородной квадратичной формой обобщенных скоростей [5]:
| (2.2) |
Коэффициенты ![]() являются функциями координат
являются функциями координат ![]() ,
, ![]() и
и ![]() .
.
Предположим, что обобщенные координаты отсчитываются от положения равновесия, где ![]() .
.
Располагая коэффициенты ![]() по степеням и пологая для упрощения записи
по степеням и пологая для упрощения записи ![]() , получим:
, получим:
| (2.3) |
Потенциальная энергия ![]() системы:
системы:
| (2.4) |
При этом учитываем, что в положении равновесия ![]() обобщенные силы также обращаются в нуль.
обобщенные силы также обращаются в нуль.
В (2.4) для упрощения приняты следующие обозначения:
 ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Для составления дифференциальных уравнений свободных колебаний в форме уравнений Лагранжа второго рода, выразим потенциальную энергию через обобщенные координаты. Рассмотрим равновесие системы, на которую действуют силы ![]()
![]() …,
…,![]() . Потенциальная энергия в состоянии устойчивого равновесия имеет минимум, равный нулю, а при вызванном действием сил
. Потенциальная энергия в состоянии устойчивого равновесия имеет минимум, равный нулю, а при вызванном действием сил ![]() отклонении от него выражается квадратичной формой вида (2.4).
отклонении от него выражается квадратичной формой вида (2.4).
Элементарная работа всех сил действующих на систему, по принципу возможных перемещений должна быть равна нулю:
| (2.5) |
Замечая, что
 |
а также приравнивая к нулю коэффициенты при независимых вариациях ![]() ,
, ![]() и
и ![]() , получаем три уравнения:
, получаем три уравнения:
 , , | (2.6) |
Здесь ![]() ,
, ![]() и
и ![]() - обобщенные силы для системы сил
- обобщенные силы для системы сил ![]()
![]() …,
…,![]() , уравновешивающих потенциальные силы, возникающие при отклонении системы из положения равновесия
, уравновешивающих потенциальные силы, возникающие при отклонении системы из положения равновесия ![]() . Заменяя в (2.6) производные потенциальной энергии их выражениями согласно (2.4), получим систему уравнений, определяющих значение координат
. Заменяя в (2.6) производные потенциальной энергии их выражениями согласно (2.4), получим систему уравнений, определяющих значение координат ![]() ,
, ![]() и
и ![]() в положении равновесия:
в положении равновесия:
 , , | (2.7) |
причем ![]() ,
, ![]() и
и ![]() .
.
Решение системы (2.7) имеет вид:
 , , | (2.8) |
где
 | (2.9) |
 .
.
На систему действуют обобщенные силы, которыми являются инерционные силы и силы сопротивления движению. Обычно в сложных системах в целях упрощения [4, 5] силу сопротивления принимают пропорциональной первой степени скорости движения. С целью упрощения условимся, что угол ![]() мал и координаты массы m можно записать как
мал и координаты массы m можно записать как ![]() . Поэтому на основании кинетостатики можем записать:
. Поэтому на основании кинетостатики можем записать:
| (2.10) |