Дипломная работа: Модель портального манипулятора
Жесткость звеньев манипулятора МРЛ-901П определялась по экспериментальным замерам деформации консоли манипулятора при действии на нее определенного усилия.
| Таблица 2.5 | ||||
| Деформация звеньев манипулятора МРЛ-901П под действием возмущающих сил | ||||
|
Возму- щающая сила | Деформация звеньев манипуляционной системы d , мм | |||
| Ось X | Ось Y | |||
| Y=0 | ||||
| 0 | 0 | 0 | 0 | 0 |
| 10 | 0,111 | 0,135 | 0,178 | 0,111 |
| 20 | 0,206 | 0,234 | 0,390 | 0,206 |
| 30 | 0,265 | 0,334 | 0,560 | 0,265 |
| 40 | 0,302 | 0,418 | 0,750 | 0,302 |
| 50 | 0,345 | 0,507 | 0,930 | 0,348 |
| 60 | 0,390 | 0,580 | 1,090 | 0,393 |
| 70 | 0,418 | 0,658 | 0,421 | |
| 80 | 0,460 | 0,745 | 0,465 | |
| 90 | 0,498 | 0,825 | 0,505 | |
| 100 | 0,534 | 0,902 | 0,540 | |
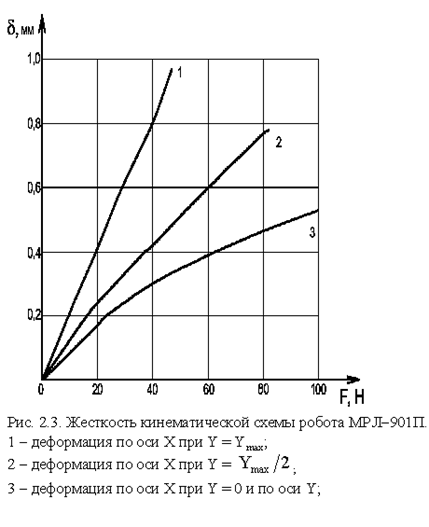
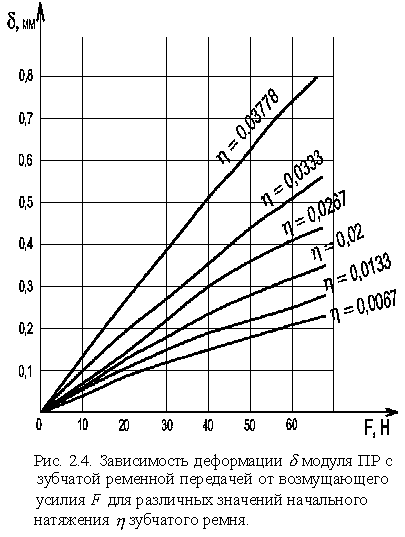
Результаты исследования жесткости приведены в таблице 2.5. По этим данным были построены график зависимости деформации от смещения рабочего органа (рис. 2.3) и график зависимости деформации от натяжения зубчатого ремня (рис.2.4).
2.4 Исследование быстроходности манипулятора
Быстроходность манипулятора характеризуется временем перемещения рабочего органа в требуемую точку. Теоретические предпосылки указывают, что непосредственное влияние на величину этого времени оказывают совместные механические характеристики (СМХ) электроприводов манипулятора.
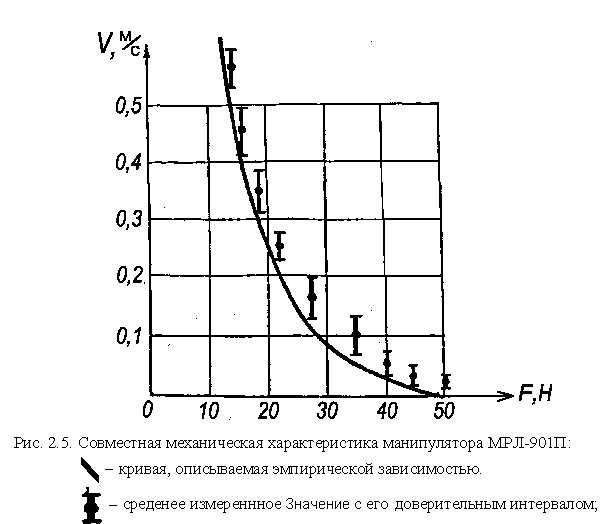
Иcследование СМХ осуществлялось путем анализа тахограмм движения манипулятора МРЛ-901П, зарегистрированных самописцем Н338Д/1. Статистически обработанные результаты экспериментов сведены в таблицу 2.6 ипредставлены в графическом виде на рис. 2.5.
Анализ экспирементальных данных показывает, что связь силы тяги, а, следовательно, и допустимого ускорения ![]() со значением достигнутой скорости
со значением достигнутой скорости ![]() существенно нелинейна. Для определения квазиоптимальных режимов движения манипулятора необходимо связать параметры a и V аналитическим выражением.
существенно нелинейна. Для определения квазиоптимальных режимов движения манипулятора необходимо связать параметры a и V аналитическим выражением.
Представим каждое значение ![]() СМХ в виде разности
СМХ в виде разности ![]() , где
, где ![]() - статическая тяговая синхронизирующая сила, а
- статическая тяговая синхронизирующая сила, а ![]() - потери тяговой силы, зависящие от скорости движения манипулятора.
- потери тяговой силы, зависящие от скорости движения манипулятора.
Такая запись СМХ имеет то очевидное приемущество, что для каждого конкретного образца манипулятора указанной модели могут быть введены уточнения формулы путем измерения одного лишь значения ![]() .
.
Следовательно, определение эмпирической формулы CМХ сводится к отысканию зависимости ![]() . Воспользовавшись способом отыскания эмпирических формул, приведенным в [7], легко установить, что экспериментальные точки
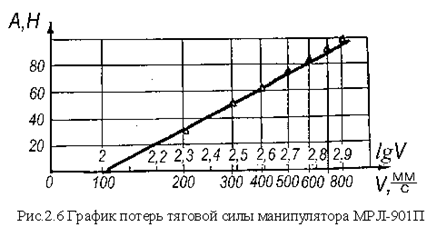
. Воспользовавшись способом отыскания эмпирических формул, приведенным в [7], легко установить, что экспериментальные точки ![]() наиболее точно отображают линейную зависиюсть на полулогарифмической функцональной координатной сетке. Из этого следует, что выражение
наиболее точно отображают линейную зависиюсть на полулогарифмической функцональной координатной сетке. Из этого следует, что выражение ![]() может быть описано логарифмической функцией. Из
может быть описано логарифмической функцией. Из
Результаты исследований совместной механической характеристики манипулятора МРЛ-901П.
| Таблица 2.6 | ||||||
|
Масса |
Число |
Численное значение синхронной скорости, м/c | ||||
| груза | паралельных опытов |
среднее арифметическое | среднее квадратическое откланение |
принимаемое значение | ||
| 2 | 10 | 0,80 | 0,013 | 0,8±0,04 | ||
| 3 | 10 | 0,74 | 0,017 | 0,74±0,05 | ||
| 4 | 10 | 0,67 | 0,016 | 0,67±0,05 | ||
| 5 | 10 | 0,59 | 0,007 | 0,59±0,02 | ||
| 6 | 10 | 0,49 | 0,013 | 0,49±0,04 | ||
| 7 | 10 | 0,38 | 0,012 | 0,38±0,04 | ||
| 8 | 10 | 0,29 | 0,010 | 0,29±0,03 | ||
| 9 | 10 | 0,24 | 0,013 | 0,24±0,04 | ||
| 10 | 10 | 0,20 | 0,011 | 0,20±0,03 | ||
| 11 | 10 | 0,16 | 0,013 | 0,16±0,04 | ||
| 12 | 10 | 0,12 | 0,006 | 0,12±0,02 | ||
| 13 | 10 | 0,05 | 0,003 | 0,05±0,01 | ||
линейной зависимости, представленной на рис. 2.6 легко отыскать коэффициенты ее уравнения, вид которого ![]() . В итоге имеем:
. В итоге имеем:
| (2.35) |
где: V измеряется в ![]() .
.
Следует, однако, заметить, что при нарастании значения экспериментальные точки ![]() несколько удаляются от прямой, описанной уравнением (2.35). Поэтому, с целью уточнения зависимости была внесена поправка, с учетом которой эмпирическая формула СМХ примет вид:
несколько удаляются от прямой, описанной уравнением (2.35). Поэтому, с целью уточнения зависимости была внесена поправка, с учетом которой эмпирическая формула СМХ примет вид:
| (2.36) |
где: V - измеряется в ![]() ; а
; а ![]() - в [Н], или
- в [Н], или
|
(2.37) |
где: ![]() ,
,![]() -допустимые мгновенные значения ускорения и скорости соответственно (при этом лежит в интервале от 0,1
-допустимые мгновенные значения ускорения и скорости соответственно (при этом лежит в интервале от 0,1![]() до 0,8
до 0,8 ![]() ).
).
2.5 Методика проведения эксперимента по определению механических характеристик манипулятора МРЛ-901П
Для исследования СМХ манипулятора портального типа МРЛ-901П наиболее удобной является следующая методика измерений.

На свободный конец вала электродвигателя ШД 5Д1МУ3 крепился тахогенератор, электрический выход которого связан с измерительной схемой (рис. 2.7) вольтметра. Схема тарировалась путем задания устройством управления 2Р22 постоянных значений скорости движения рабочего органа манипулятора. При этом электродвигатель был полностью разгружен от момента нагрузки.
После тарировки к рабочему органу манипулятора прикреплялась перекинутая через ролик гибкая стальная нить, на свободный конец которой подвешивался переменный груз ![]() . По команде системы управления электродвигатель начина
. По команде системы управления электродвигатель начина