Дипломная работа: Однокритериальный измеритель частотной избирательности радиоприёмника
Таким образом, на выходе управляемого аттенюатора 11 формируется зондирующее воздействие, соответствующее энергетической и частотной модели реальной электромагнитной обстановки.
С выхода управляемого аттенюатора 11 зондирующее воздействие подаётся на вход контролируемого радиоприёмника 19, отклики которого с выхода его усилителя промежуточной частоты поступают на амплитудный детектор 14, с выхода которого огибающая отклика поступает на компаратор 15, предназначенный для нормирования амплитуды отклика для согласования с входными уровнями цифровых микросхем. Импульсы, соответствующие откликам, поступают на в0торой делитель частоты 16 с коэффициентом деления
![]()
N0 соответствует количеству откликов, возникающих на выходе контролируемого радиоприёмника 19 за время измерения Ти за счёт основных каналов приёма. Таким образом, на выходе второго счётчика импульсов 17 получают двоичный код
![]() , (1.7)
, (1.7)
где Nc – общее количество откликов на выходе контролируемого радиоприёмника 19 за время измерения Т3 (за счёт как основных каналов приёма, так и побочных).
Физический смысл величины G виден из выражения:
![]() , (1.8)
, (1.8)
где ![]() - эквивалентная по числу проникающих сигналов полоса пропускания радиоприёмника с учётом побочных каналов приёма.
- эквивалентная по числу проникающих сигналов полоса пропускания радиоприёмника с учётом побочных каналов приёма.
Таким образом, G – статистическая характеристика контролируемого радиоприёмника 19, показывающая относительную ширину эквивалентной по числу проникающих сигналов полосы пропускания контролируемого радиоприёмника 19 в условиях реальной электромагнитной обстановки.
Двоичный код, полученный в результате измерения величины G, поступает на второй дешифратор 18, на выходе которого подключён индикатор 12.
После прохождения через первый счётчик 5 всей совокупности импульсов на его выходе переполнения появится импульс блокировки, поступающий на вход блока 13 запуска, на выходе которого появится потенциал, блокирующий работу генератора 1, и процесс контроля прекратится. Таким образом, время измерения строго стабилизировано, и цикл изменения полностью автоматизирован.
При очередном запуске после нажатия кнопки, входящей в состав блока 13 запуска, на выходе блока 13 запуска вырабатывается импульс установки первого и второго счётчиков 5, 17 импульсов и первого и второго делителей частоты 2, 16 в нулевое состояние, и процесс измерения повторится.
Формула изобретения
Устройство контроля восприимчивости радиоприёмника к помехам, содержащее первый и второй счётчики импульсов, индикатор, управляемый аттенюатор, выход которого является входом контролируемого радиоприёмника, амплитудный детектор, сумматор, выход которого соединён с информационным входом управляемого аттенюатора, последовательно соединённые генератор тактовых импульсов, первый делитель частоты, первый генератор пилообразного напряжения и первый генератор качающейся частоты, второй делитель частоты, последовательно соединённые второй генератор пилообразного напряжения, вход которого соединён с выходом генератора тактовых импульсов, и второй генератор качающейся частоты, отличающееся тем, что, с целью повышения достоверности контроля, введены блок запуска , компаратор, последовательно соединённые мультиплексор, вход которого соединён с информационным выходом первого счётчика импульсов, и первый дешифратор, выход которого соединён с управляющим входом управляемого аттенюатора, второй дешифратор, вход и выход которого соединены соответственно с выходом второго счётчика импульсов и входом индикатора, вход амплитудного детектора является выходом контролируемого радиоприёмника, а выход амплитудного детектора подключён к входу компаратора, выход которого соединён с входом второго делителя частоты, выход которого соединён с информационным входом второго счётчика импульсов, выходы первого и второго генераторов качающейся частоты соединены соответственно с первым и вторым входами сумматора, выход генератора тактовых импульсов соединён с входом первого счётчика импульсов, выход переполнения которого соединён с входом блока запуска, выход которого подключён к входу запрета генератора тактовых импульсов и к входу установки нуля первого и второго делителей частоты первого и второго счётчиков импульсов.
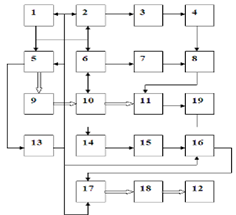
Рис.1 Структурная схема устройства контроля восприимчивости радиоприёмника к помехам
2. Разработка структурной схемы устройства
2.1 Расчёт основных системных показателей
В данном разделе даётся описание метода обобщенной (однокритериальной) оценки частотной избирательности радиоприёмника, а так же соображения о построении аппаратуры. Предполагается применение двухчастотного зондирования с имитацией статистических характеристик прогнозируемой электромагнитной обстановки. Были получены количественные соотношения, характеризующие метод, среди которых важнейшим следует считать формулы для расчёта минимального времени контроля; анализируются пути его уменьшения. Частотная избирательность радиоприемников (РПр) является важнейшей характеристикой, во многом определяющей способность радиотехнической системы к совместной работе с другими радиосредствами.
Резкое усложнение ЭМО и обострение проблемы ЭМС требуют учета взаимодействия непреднамеренных радиопомех (НРП) между собой на нелинейных элементах самого РПрУ. В связи с этим целесообразно применить многосигнальное (хотя бы двухсигнальное) воздействие. Прототипом описываемого здесь метода может служить известный [4] более чем 12 лет, разработанный в Минском радиотехническом институте, метод двухчастотного зондирования. Предлагается дальнейшее развитие метода, состоящее в следующем: зондирующие сигналы должны воспроизводить статистические свойства НРП, в частности по вероятностным распределениям несущих частот и мощности; конечный результат должен формироваться как интегральный, полученный при установке прогнозируемых условий работы РПрУ. Краткое описание метода опубликовано в [5,6].
Структурная схема устройства, реализующего предлагаемый метод, изображена на рис.2.1. Управление сканированием частот соответственно управляемых генераторов УГ1 и УГ2 в диапазоне Df, осуществляется програмно по линейному закону.
Выбор количества генераторов равного двум обусловлен тем, что большинство вопросов, связанных с влиянием интермодуляции, могут быть решены на основе изучения случая взаимодействия двух сигналов. Выбор двух сигналов обосновывается и тем, что вероятность проникновения на вход первого нелинейного элемента РПрУ одновременно трех и более помеховых сигналов с мощностью, достаточной для образования интермодуляции для большинства современных РПрУ значительно меньше вероятности проникновения двух сигналов с такими же параметрами, а сложность процессов, происходящих в РПрУ и время измерения значительно возрастают при увеличении количества взаимодействующих сигналов.
Если считать функции f1(t) и f2(t) случайными, то можно обеспечить соответствие вероятностных распределений w(f) в диапазоне частот Df заданной ЭМО. В частном случае можно имитировать равномерное распределение несущих частот непреднамеренных радиопомех (НРП).
Сигналы УГ1 и УГ2 после прохождения соответственно аттенюаторов АТ1 и АТ2 складываются в сумматоре (С).
Микроконтроллер управляет коэффициентом затухания управляемого аттенюатора АТ1 и АТ2, обеспечения изменение мощности зондирующего сигнала по заданному закону Р(t) в диапазоне DP (![]() ). При этом за время измерения имитируемое ансамблевое распределение мощностей испытательных сигналов аналогично вероятностному распределению w(Р), получаемому методом статистических испытаний за произвольный период времени.
). При этом за время измерения имитируемое ансамблевое распределение мощностей испытательных сигналов аналогично вероятностному распределению w(Р), получаемому методом статистических испытаний за произвольный период времени.
Таким образом, контролируемый РПрУ подвергается воздействию двух сигналов, имеющих заданные вероятностные распределения частот w(f) и мощностей w(P), которые должны соответствовать распределениям, полученным на основе изучения или прогнозирования реальной ЭМО. Это существенно сближает условия измерения и эксплуатации.
В предлагаемом устройстве оценка частотной избирательности происходит косвенно, путём определения числа:
![]() (2.1)
(2.1)