Дипломная работа: Проектирование круглосуточной оптико-телевизионной системы
![]() , где (31)
, где (31)
Pлт = 0.05 – вероятность ложной тревоги,
Pобн = 0.95 – вероятность правильного обнаружения,
u = Lp-1 (v ) – обратная функция Лапласа, т.е. аргумент u функции Лапласа v = Lp(u ) при значении самой функции, равном v .
Подставив значения, получим: ![]() = 13.68
= 13.68
Таким образом Lрасп = 6772 [м].
Расчет дальности распознавания для цели №2.
Аналогичен расчету для цели №1, но с изменением одной из зависимостей (17). Поверхность фона в данном случае практически параллельна оси распространения излучения лазера, поэтому отражением этого излучения от фона можно пренебречь.
![]() (32)
(32)
В результате получимLрасп = 6704 [м].
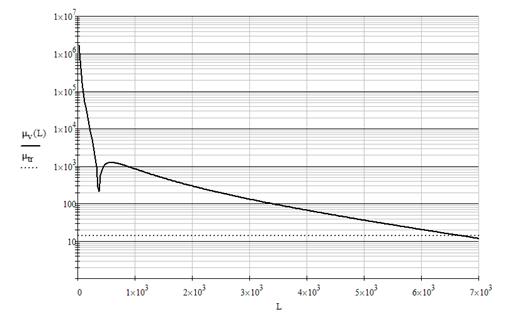
Рис . 5. Зависимость воспринимаемого отношения сигнал/шум от дальности распознавания цели №2.
Дальность распознавания объекта дневной ПЗС-камерой.
Данные для расчёта:
1) Входной объектив.
Фокусное расстояние Fob = 600 мм.
Дальность распознавания не менее 6700 м.
Интегральный коэффициент пропускания в рабочем диапазоне: Kob = 0,82.
Предположим, что для достижения необходимой дальности распознавания достаточно будет иметь диаметр входного зрачка, удовлятворяющий условию параксиальной системы (D : f’ = 1 : 10). Тогда DДТВ = 60 мм.
ФПМ дифракционно ограниченной системы определяется как[2]:
 , где(33)
, где(33)
![]() [мм-1 ].
[мм-1 ].
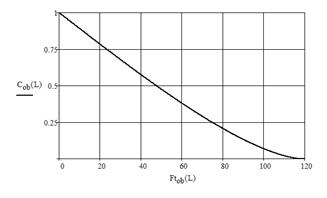
Рис. 6. Функция передачи модуляции входного объектива дневного канала.
2) ПЗС матрица
Помимо указанных в предыдущем разделе параметров, необходима относительная спектральная чувствительность ПЗС-матрицы:
3) Фоноцелевая обстановка отличается от описанной в разделе 2.2.2.1 уровнем освещённости Земной поверхности: Ev = 104 лк.
· Рассчитаем спектральную яркость объекта и фона:
Аналогично п. 2.2.2.1, но относительная спектральная яркость источника (Солнце) описывается исходя из соотношения Планка для АЧТ, нагретого до температуры 5217 К.