Контрольная работа: Автоматическое управление системами автомобиля
Выполнил: ст. гр. АВ-51зКалашников
Проверил: доц. Долгин. В.П.
Севастополь
2010
ЗАДАНИЕ
Для подвески автомобиля указанной модели (выбрать в соответствии с вариантом)
1. построить переходную h ( t ) (исследование подвески во временной области) и
2. частотные характеристики (исследование подвески в частотной области) A ( w ), F ( w ), Jm ( w ), Re ( w ), Jm ( Re ( w )) в диапазоне частот от Wmin = Wr /10 рад/с до Wmax = Wr *10 рад/с.
ЧАСТОТНЫЕ И ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ
ПОДВЕСКИ АВТОМОБИЛЯ МОДЕЛИ
Ст. гр. АВ-51з Калашников
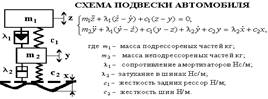
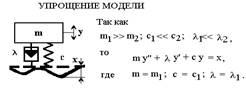
Рисунок 1.1 – Кинематические схемы подвески автомобиля
Обозначения:
W - передаточная функция,
R(w)- вещественная частотная характеристика,
M(w)- мнимая частотная характеристика,
A(w)- амплитудная частотная характеристика,
F(w)- фазовая частотная характеристика,
ПАРАМЕТРЫ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
W = b0/(a0+a1*p+a2*p^2);
a0 = c:a1:=L:a2:=m:b0:=c:
Yu = x*limit(W,p=0);
ПАРАМЕТРЫ ПОДВЕСКИ
Ma – 10185 Масса автомобиля
Mg –5000Грузоподъемность
Kz – 0 Коэффициент загрузки
Dh – 0.1 Осадка под нагрузкой
xi – 0,5 Коэффициент демпфирования (комфортности, xi =0,3..0,8)
m = (Ma+Mg*Kz)/4;
c = evalf(Mg*9.81/Dh)/4;
L = 2*xi*c*sqrt(m/c);
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ
При вычислениях переходной характеристики звена операторным методом необходимо выполнить следующие действия.
Получить изображение X (p ) по Лапласу входного сигнала X (t ) в соответствии с определением
X (p ) => L{X (t ) },
--> ЧИТАТЬ ПОЛНОСТЬЮ <--