Контрольная работа: Динамический анализ механизмов
но: 
тогда:  ;
;
Окончательно:  ;
;
Величина ℓSK для данного звена является величиной постоянной, не зависящей от его положения. Точка К всегда дальше от оси вращения, чем центр тяжести S.
6. Общий случай плоско-параллельного движения звена (рис.7).
Сила инерции: ![]() .
.
Сложное движение состоит из 2-х движений: из поступательного движения звена вместе с точкой А и вращательного движения звена относительно точки А. В соответствии с этим ускорение центра тяжести складывается из 2-х ускорений: ![]() .
.
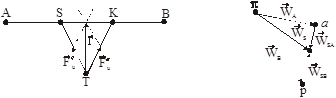
Рис.7
Тогда силы инерции звена в поступательном движении:
![]()
и силы инерции во вращательном движении:
![]()
Сила инерции в поступательном движении ![]() проходит через центр тяжести и направлена противоположно
проходит через центр тяжести и направлена противоположно ![]() .Сила инерции в относительном вращательном движении
.Сила инерции в относительном вращательном движении ![]() при учете момента сил инерции Мu проходит через точку качания «К» и направлена противоположно ускорению
при учете момента сил инерции Мu проходит через точку качания «К» и направлена противоположно ускорению ![]() . Следовательно сила
. Следовательно сила ![]() , являясь суммой сил
, являясь суммой сил ![]() и
и ![]() , проходит через точку пересечения Т линий действия этих сил и направлена противоположно ускорению центра тяжести WS.
, проходит через точку пересечения Т линий действия этих сил и направлена противоположно ускорению центра тяжести WS.
Для определения силы Fu и точки её приложения силы ![]() и
и ![]() находить не следует.
находить не следует.
Для определения точки Т следует из центра тяжести S провести прямую, параллельную ускорению ![]() , а через точку качания К - параллельную ускорению
, а через точку качания К - параллельную ускорению ![]() . Точка пересечения этих прямых и есть точка Т, через которую проходит сила инерции:
. Точка пересечения этих прямых и есть точка Т, через которую проходит сила инерции:![]() .
.
Положение точки К для всех положений звена одинаково.
4. Кинетостатический расчет механизмов
Силовой расчет механизмов ведем в предположении, что трение в кинематических парах отсутствует и все силы, действующие на звенья механизма, расположены в одной плоскости.
При отсутствии сил трения сила взаимодействия между 2-мя звеньями всегда направлена по нормали к поверхности их касания. В поступательной паре все элементарные силы взаимодействия и их равнодействующая будут расположены перпендикулярно направляющей поступательной пары.
Наиболее удобным методом силового расчета механизма является метод планов сил.
При силовом расчете механизм расчленяется на отдельные группы, при этом расчет начинается с группы, присоединенной последней в процессе образования механизма, а заканчивается расчетом ведущего звена начального механизма. Если плоский механизм имеет одну степень свободы, то начальный механизм состоит из 2-х звеньев: неподвижного (стойка) и начального звена. Эти звенья образуют либо вращательную кинематическую пару (кривошип-стойка), либо поступательную пару (ползун-направляющие). Звено, к которому приложена уравновешивающая сила Fу, будем считать при силовом расчете начальным звеном механизма. Реакция в начальном вращательном механизме зависит от способа передачи энергии начальному звену источником энергии. Если кривошипный вал приводится во вращение парой, например, непосредственно от электродвигателя, то в этом случае к валу приложен уравновешивающий момент.: Му=R3,2·h ![]() Нм
Нм![]() и реакция в опоре О вала (звено 1) будет равна действию звена 3 на звено 2 (кривошип) (рис.7).
и реакция в опоре О вала (звено 1) будет равна действию звена 3 на звено 2 (кривошип) (рис.7).
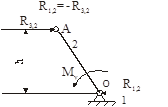
Рис.7
Рассмотрим на примере двухповодковой группы шатун АВ-ползун В кривошипно-ползунного механизма ДВС способ силового расчета, основанный на методе планов сил (рис.8).
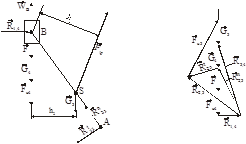
Рис.8