Контрольная работа: Исследование системы управления подводного аппарата по вертикальной координате
Выполнил:
студент группы Р-7791
Павловский М.И.
Владивосток 2010 г.
1. Управление П.А. по разомкнутому контуру
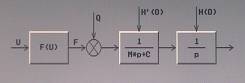
Динамика П.А., как объекта управления по высоте над дном (глубине) может быть приближённо описана следующим дифференциальным уравнением:
M*H’’+C*H’=F+Q
Численные значения коэффициентов: M=3000кг, C=1500кг/с, Q=1000H, Fmax =2000H, K1=400H/В, H(0)=4м, H’(0)=0м/с.
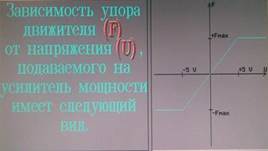
Статическая характеристика двигателя
Структурная схема объекта управления в соответствии с приведённой моделью динамики .
Исследуем поведение П.А. при управлении им по разомкнутому контуру, задавая последовательно U=1, -2, -2.5, -5, -100B.
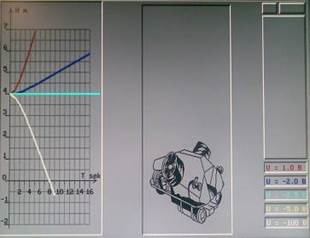
При U=1В подводный аппарат всплывает, т.к. при этом тяга движителя F=K1*U=400H и направлена вверх. Кроме того вверх направлена сила положительной плавучести Q=1000H.
При U=-2В подводный аппарат всплывает, т.к. F+Q=200H.
При U=-2,5B подводный аппарат зависает на начальной высоте из-за уравновешивания упором движителя архимедовой силы (плавучести).
При U=-5B подводный аппарат погружается.
Из-за ограничения в статической характеристике при U=-100B поведение аппарата не отличается от его поведения при U=-5B.
Выводы: управление подводным аппаратом по разомкнутому контуру, путём подачи на двигатель постоянного напряжения позволяет лишь разогнать аппарат до определённой скорости погружения или всплытия. Увеличение скорости движения П.А. при увеличении управляющего напряжения возможно лишь в пределах линейной зоны статической характеристики движителя. Автоматическое выведение подводного аппарата над дном невозможно, т.к. в момент встречи аппарата с дном его вертикальная скорость не равна нулю.
2. Построение регулятора высоты П.А.
Для построения системы автоматического выведения подводного аппарата на заданную высоту (глубину) необходимо ввести обратную отрицательную связь по высоте П.А. над дном. Закон управления движителем при этом принимает вид: U=K3*(K4*H3 – K2*H)=-K3*K2*H, при H3=0.
Структурная схема регулятора:
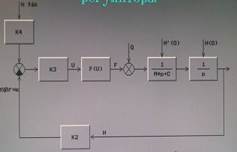
Величина коэффициента усиления регулятора К3 влияет на статическую точность и характер переходного процесса. С увеличением К3 регулятора статическая точность регулирования подводного аппарата над дном увеличивается .
При H=0.1м, К1=400Н/В, К2=1м./В и Q=1000H: К3 min =25
При увеличении К3 переходный процесс протекает быстрее, но увеличивается его колебательность и перерегулирование. При уменьшении К3 время переходного процесса увеличивается, и процесс приближается к апериодическому.
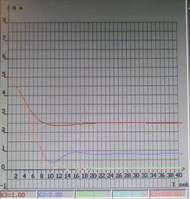
Выводы: При значениях коэффициента усиления регулятора К3>=К3min можно достичь необходимой статической точности стабилизации высоты П.А. над дном. Однако, качество переходного процесса при этом неудовлетворительно. Колебания и перерегулирования в переходном процессе приводят к ударам подводного аппарата о дно. Уменьшение коэффициента регулирования К3<К3min может привести к уменьшению колебательности в переходном процессе, что позволяет избежать ударов П.А. о дно, однако при этом ухудшается статическая точность стабилизации, а время переходного процесса обычно затягивается.
3. Коррекция качества переходного процесса
Улучшить качество переходного процесса и быстродействие в системе управления при сохранении заданной статической точности стабилизации высоты П.А. над дном можно, благодаря введению отрицательной обратной связи по скорости. Закон управления движителем при этом принимает вид:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--