Контрольная работа: Коррекция систем автоматического управления
Любая система должна быть устойчивой и удовлетворять требованиям по точности и качеству переходного процесса.
Существует два пути достижения этих целей:
1. Изменение варьируемых параметров системы (параметры регулятора), но требования по качеству и устойчивости часто являются противоречивыми, например, увеличение коэффициента усиления системы повышает точность системы, но при этом система может стать неустойчивой.
2. Изменение структуры системы, путем введения дополнительных устройств, называемых корректирующими.
При коррекции систем управления решается задача синтеза корректирующего устройства, которая заключается в определении структуры и параметров корректирующего устройства, включение которого делает систему удовлетворяющей поставленным к ней требованиям.
2. Корректирующие устройства
Корректирующие устройства чаще всего представляют собой пассивные четырехполюсники, состоящие из RC – элементов. Эффективность корректирующих устройств определяется правильным выбором их параметров (ki , Ti ). Если сигналы электрические используются RC – цепи, если не электрические, то используются их механические аналоги (рис. 1а).
Корректирующие устройства можно классифицировать:
1. По видам: последовательные и параллельные.
2. По типам: дифференцирующие, интегрирующие и интегро-диффе-ренцирующие.
Последовательная коррекция. При последовательной коррекции корректирующее устройство включается последовательно в контур управления (рис. 1б).
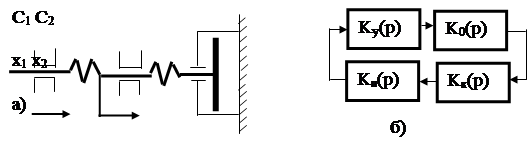 |
Рис. 1
При этом передаточная функция разомкнутой системы, независимо от места включения корректирующего устройства равна
![]()
Так как корректирующее устройство чаще всего представляет собой пассивный RC –фильтр, то ставить его в цепь, где передаются большие мощности, не рационально с точки зрения энергетических затрат, так как при этом необходимы дорогостоящие корректирующие устройства (большие потери мощности).
Так как ОУ - мощное устройство, УУ - менее мощное устройство, ИУ - маломощное устройство, то обычно корректирующие устройства включаются на входе системы либо выходе измерительного устройства.
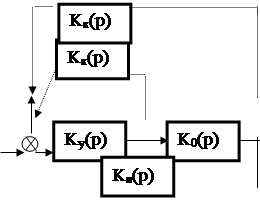
Параллельная коррекция. При параллельной коррекции, корректирующее устройство может быть включено параллельно любому звену или соединению звеньев (рис. 2а).
При этом передаточная функция скорректированной системы зависит от места включения корректирующего устройства. Синтез параллельных корректирующих устройств сложнее, чем последовательных.
Рассмотрим различные типы корректирующих устройств и их характеристики.
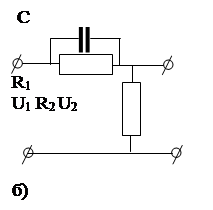
Дифференцирующее корректирующее устройство. Схема дифференцирующего корректирующего устройства приведена на рис. 2б.
 |
 |
|
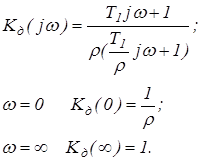
Передаточная функция дифференцирующего корректирующего устройства имеет вид

где 
k -коэффициент ослабления контура.
Частотные характеристики дифференцирующей цепи, приведены в таблице 1.
Таблица 1
АФХ | Логарифмические характеристики | ||
  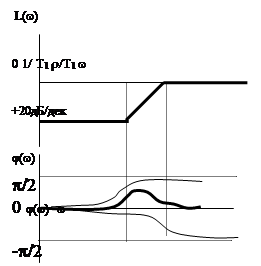  |
Работа дифференцирующего корректирующего устройства. Введение дифференцирующего корректирующего устройства уменьшает коэффициент усиления на низких частотах, что уменьшает точность системы, но увеличивает запас устойчивости.
За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы, но расширение полосы пропускания увеличивает действие помех.
Интегрирующее корректирующее устройство. Схема интегрирующего
корректирующего устройства приведена на рис. 3а.
На схеме рис. 5 приняты следующие обозначения
 .
.
Передаточная функция интегрирующей цепи имеет вид
--> ЧИТАТЬ ПОЛНОСТЬЮ <--