Контрольная работа: Наблюдатель Люенбергера
В соответствии с проведенными вычислениями уравнения наблюдателя принимают вид:
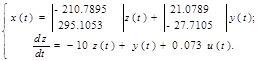
2. Оценивание вектора состояний с помощью наблюдателя Люенбергера
Зададим полученные коэффициенты в MatLab.
a1= -10;
a2=1;
b1= - 0. 0730 ;
![]() ;
;
![]()
![]()
В среде Simulinkсистемы Matlabпостроим структурную схему объекта и наблюдателя.
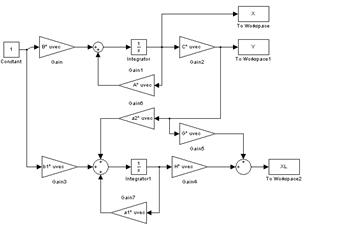
Рис 1 – Simulink -модель объекта и наблюдателя.
На данной модели приняты обозначения:
X,Y– вектор состояния и вектор изменения объекта;
XL– вектор состояния наблюдателя (т.е. оценка вектора состояния объекта).
Запись A*uvec, B*uvec, C*uvec, G*uvec, H*uvec, a1*uvec, a2*uvecи b1*uvecобозначает векторное умножение A, B, C, Gили Hи скалярных величин a1, a2, b1 на соответствующий входной сигнал.
Построим графики вектора состояния
t =0:0.1:10;
figure(1);
plot(t, X(:,1),'b',t,XL(:,1),'or');
grid;
figure(2);
plot(t, X(:,2),'b',t,XL(:,2),'or');
grid;
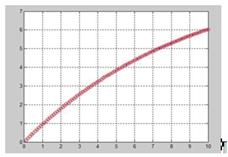
Рис. 2 – истинные и восстановленные значения координат первой компоненты вектора состояния системы
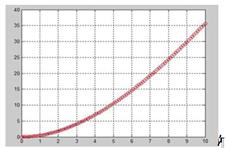
Рис. 3 – истинные и восстановленные значения координат второй компоненты вектора состояния системы
На рисунках 2 и 3 линией показаны истинные кривые значения вектора координат объекта, а символами ‘o’ – восстановленные. Из графиков можно сделать вывод, что при отсутствии помех, в «идеальных условиях», с помощью наблюдателя пониженного порядка можно очень точно оценить координаты вектора состояния. Но в зашумленных условиях, наблюдатель Люинбергера ведет себя неадекватно, т.к., в отличие от наблюдателя полного порядка (фильтр Калмана), оцениваются и учитываются лишь неизвестные компоненты вектора состояния. Если же на выход системы подать помеху, то в системе при измерении, наблюдатель неверно оценивает координаты вектора состояния.