Контрольная работа: Основы электропривода
1 Определение понятия «электропривод»
2 Классификация электроприводов
3 Режимы работы электропривода
4 Уравнения движения электропривода при поступательном и вращательном движении
5 Влияние параметров ![]() ,
, ![]() ,
,![]() на вид скоростных (механических) характеристик двигателя постоянного тока с параллельным возбуждением. Регулирование скорости вращения двигателя
на вид скоростных (механических) характеристик двигателя постоянного тока с параллельным возбуждением. Регулирование скорости вращения двигателя
6 Влияние параметров ![]() (сопротивление роторной цепи),
(сопротивление роторной цепи), ![]() , f на вид механических характеристик асинхронного двигателя с короткозамкнутым и фазным ротором. Способы регулирования скорости вращения асинхронных двигателей
, f на вид механических характеристик асинхронного двигателя с короткозамкнутым и фазным ротором. Способы регулирования скорости вращения асинхронных двигателей
7 Рассчитать для двигателя постоянного тока с параллельным возбуждением
с параметрами: ДП-41 ступени пусковых сопротивлений. Изобразить схему включения сопротивлений в цепь якоря и соответствующие характеристики
8 Рассчитать для асинхронного двигателя с фазным ротором с параметрами: МТВ311-8 ступени пусковых сопротивлений. Изобразить схему включения сопротивлений в цепь ротора и соответствующие расчетные характеристики
Перечень использованной литературы
1 Определение понятия «электропривод»
Электрический привод представляет собой электромеханичёское устройство, предназначенное для приведения в движение рабочего органа машины и управления ее технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины, и системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и ряд других факторов. С другой стороны, нагрузка механической части привода, условия движения ее связанных масс, точность передач и т. п. оказывают влияние на условия работы двигателя и системы управления, поэтому электрические и механические элементы электропривода образуют единую электромеханическую систему, составные части которой находятся в тесном взаимодействии.
Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода (рисунок 1.1) ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства.
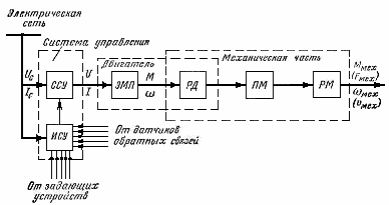
Рисунок 1.1 – Схема автоматизированного электропривода
2 Классификация электроприводов
Электроприводы по способам распределения механической энергии можно разделить на три основных типа: групповой электропривод; индивидуальный и взаимосвязанный.
Групповой электропривод обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и ее распределение между ними производится с помощью одной или нескольких трансмиссий. Такой групповой привод называют также трансмиссионным (рисунок 2.1).
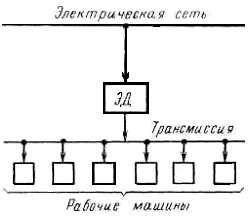
Рисунок 2.1 – Структурная схема группового трансмиссионного электропривода
Вследствие своего технического несовершенства трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному,хотя в ряде случаев еще находит применение и групповойпривод по схеме на рисунке 2.2.

Рисунок 2.2 – Структурная схема группового электропривода
Индивидуальный привод по сравнению с трансмиссионным и групповым обладает рядом преимуществ: производственныепомещения не загромождаются тяжелыми трансмиссиямии передаточными устройствами; улучшаются условия работы и повышается производительность трудавследствие облегчения управления отдельными механизмами, уменьшения запыленности помещений, лучшего освещениярабочих мест; снижается травматизм обслуживающего персонала. Кроме того, индивидуальный электропривод отличается более высокими энергетическими показателями.
В трансмиссионном приводе при выходе из строя или при ремонте электродвигателя выбывает из работы группа машин, тогда как в случае индивидуального привода или группового по схеме на рисунке 2.2 остановка одного электродвигателя вызывает остановку лишь одной рабочей машины.
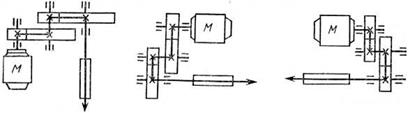
Рисунок 2.3 – Индивидуальные электроприводы рабочих органов (шпинделей) продольно-фрезерного станка
Индивидуальный электропривод широко применяется в различных современных машинах, например в сложных металлорежущих станках, в прокатных станах металлургического производства, в подъемно-транспортных машинах, экскаваторах, в роботах-манипуляторах и т. п.
Примером использования индивидуального привода может служить продольно-фрезерный станок (рисунок 2.3), имеющий отдельные электроприводы главных движений (приводы трех шпиндельных бабок).
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электродвигательных устройства (или электроприводов), при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузокили положение исполнительных органов рабочих машин. Необходимость в таком приводе часто возникает по конструктивным пли технологическим соображениям.
Примером взаимосвязанного электропривода может служить приводцепного конвейера. На рисунке 2.4 показана схема такого привода, рабочим органом которого является цепь, приводимая в движение двумя или несколькими двигателями (М1, М2),расположеннымивдоль цепи. Эти двигатели имеют вынужденно одинаковую скорость.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--