Контрольная работа: Основы электропривода
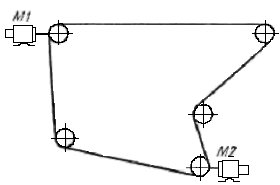
Рисунок 2.4 – Схема взаимосвязанного привода конвейера
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т. п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамическиедвигатели).
По степени управляемости электропривод может быть:
1) нерегулируемый — для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый — для сообщения изменяемой пли неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый — управляемый в соответствии с заданной программой;
4) следящий — автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный — автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства . В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
3 РЕЖИМЫ РАБОТЫ ЭЛЕКТРОПРИВОДА
Все режимы в электроприводе делятся на установившиеся (номинальный режим работы) и переходные (пуск, реверс, торможение) .
Установившийся режим работы электропривода определяется из условия равенства нулю динамического момента. Этот режим характеризуется работой двигателя с неизменной угловой скоростью, постоянными во времени и равными по величине моментом двигателя и моментом сопротивления. Так как момент, развиваемый двигателем в установившемся режиме, есть функция скорости, то равенство М=Мс возможно только при условии, что момент сопротивления — постоянная величина или функция скорости. Если МС есть функция, например, пути (угла поворота), то даже при постоянной угловой скорости момент сопротивления изменяется во времени и установившийся режим невозможен.
Установившийся режим описывается статическими характеристиками.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.).
Характер переходного режима электропривода зависит от свойств рабочей машины, типа примененного двигателя и механической передачи, принципа действия и свойств аппаратуры управления, а также от режима работы двигателя (пуск, торможение, прием и сброс нагрузки и т. д.).
Переходные режимы описываются динамическими характеристиками.
4 УравнениЕ движения электропривода
Электродвигатели, преобразующие электрическую энергию в механическую, создают вращательное движение; значительная часть машин-орудий также имеет вращающиеся рабочие органы; поэтому представляется целесообразным вывод уравнения движения сделать сначала для случая вращательного движения .
В соответствии с основным законом динамики для вращающегося тела векторная сумма моментов, действующих относительно оси вращения, равна производной момента количества движения:
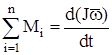 (4.1)
(4.1)