Контрольная работа: Структуры и компоновочные схемы гибких производственных модулей и систем
Рис. 2 - Типы организации материальных потоков
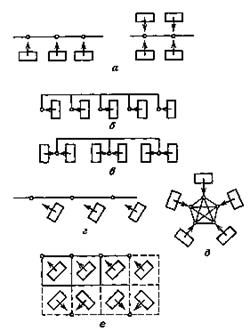
Рис. 3 - Рекомендуемые схемы размещения основного технологического оборудования
Дипольная компоновка рекомендуется в случае необходимых перестановок и дает возможность промышленному роботу или манипулятору обслуживать два станка. Поперечная компоновка применима для ГПС, изготовляющих корпусные детали и детали типа тел вращения. В качестве пристаночного транспорта может применяться конвейер или портальный робот.
Условия компоновки ГПС позволяют сократить ее протяженность и целесообразны в случае изготовления деталей типа тел вращения. Круговую компоновку применяют в ГПС для изготовления различных деталей при использовании в качестве транспортного и загрузочного средства манипулятора вращательного типа. Комбинированная компоновка предпочтительна, если она выполняется в форме решетки с квадратными ячейками.
4. Типовые компоновочные структуры в зависимости от способов реализации подачи инструмента следующие: с ручной тележкой, с общим автоматическим транспортом для деталей и инструмента; со специальным транспортом для инструмента.
5. Типовые компоновочные структуры в зависимости от компоновки АТСС по направлению протяженности склада следующие: вдоль линии панков; перпендикулярно линии станков; без склада.
Склады вдоль линии станков целесообразно использовать при однорядном расположении станков; поперечные склады рекомендуются при многорядном расположении станков. Планировка с поперечным складом занимает меньшую площадь, но требуется транспорт, обслуживающий станки.
6. Способы удаления отходов могут быть следующими: централизованный, обеспечивающий автоматическую уборку стружки; децентрализованный, более дешевый, требующий периодического обслуживания человеком.
7. При проектировании компоновочных структур следует стремиться к минимизации используемой производственной площади, суммарного пути перемещения транспортных средств (ТС) и суммы затрат на создание транспортной системы.
8. Компоновочные структуры должны обеспечивать свободный доступ обслуживающего персонала к основному и вспомогательному оборудованию, зоны их обслуживания и ремонта.
9. Компоновочные структуры должны быть такими, чтобы обеспечивалось согласование материальных потоков со смежными участками или цехами.
10. Вместимость межоперационных складов-накопителей должна обеспечить хранение запаса заготовок (полуфабрикатов), ожидающих обработки на отдельных станках, с учетом времени установки различных деталей, хранение запаса заготовок (полуфабрикатов), компенсирующего наложенные простои оборудования вследствие его случайных отказов, оптимизацию загрузки станков.
11. Количество и технические параметры ТС следует выбирать с учетом повышенного коэффициента использования станочного оборудования в составе ГПС и возможности работы в двух основных режимах: автоматическом - с управлением от центральной ЭВМ и полуавтоматическом - с управлением от оператора.
12. В качестве основного принципа построения ГПМ и ТС следует использовать агрегатно-модульный, позволяющий на единой конструктивной базе реализовывать различные компоновочные структуры и технологические процессы с учетом специфики конкретных производственных помещений.
13. Основные технические параметры ГПС [3, 6, 8]. При числе станков в ГПС от 2 до 50 (преимущественно 4...8) на них изготовляют изделия неограниченной номенклатуры, однако в основном типа тел вращения и корпусных деталей. Габаритные размеры изготовляемых деталей на спутниках составляют 10...5000 мм, но чаще всего 250...800 мм.
Для транспортирования заготовок применяются чаще всего рельсовые тележки и индуктивно управляемые тележки - робокары. Кроме того, находят применение электрокары, краны и роботы.
Загрузка-разгрузка станков ГПС осуществляется чаще всего на спутниках, реже роботом или вручную. Вместе с тем, смена инструмента в магазинах станков осуществляется главным образом вручную и реже АСИО на спутниках или кассетами.
В ГПС преимущественно используется ЦЭВМ и осуществляется 2-й уровень автоматизации.
Хронологическая последовательность освоения ГПМ следующая:
· многоцелевые станки с ЧПУ, имеющие одинаковые технологические возможности по выполнению широкого круга сверлильно-фрезерно-расточных операций; токарные;
· токарные многоцелевые станки, конструкция и компоновка которых определяются преобладающим значением токарной обработки и возможностью комплексной обработки заготовки благодаря осуществлению за один установ обработки так же осевым инструментом (сверла, зенкеры, развертки и др.);
· фрезерные многоцелевые: преобладающим значением фрезерной обработки и соответственно с высокой мощностью привода главного движения и большими силами перемещений по координатам;
· шлифовальные;
· зубообрабатывающие и т.д.
В токарных и токарных многоцелевых ГПМ для автоматизации загрузки заготовок и удаления деталей широко применяют промышленные роботы. Промышленный робот может быть как самостоятельной единицей, так и конструктивно объединенным с основным технологическим оборудованием.
На рис. 4, а показан промышленный робот 4 (вид в плане), встроенный в токарный станок с системой управления 3. Тактовый стол 5 подает заготовку на фиксированную позицию. Промышленный робот снимает заготовку и устанавливает ее в рабочую зону станка 2. После обработки изготовленная деталь снимается и устанавливается роботом в ту же позицию тактового стола. Затем система управления / промышленного робота подает сигнал перемещения тактового стола на один шаг: готовая деталь перемещается на другую позицию, а на ее место поступает новая заготовка. Системы управления станка и робота зачастую объединяют в одну систему управления ГПМ.
а - встроенного в токарный станок; б - портального; в - рядом с токарным станком; г - встроенного в многоцелевой ГПМ
На рис. 4, б показан портальный промышленный робот 4, установленный над станком 2 (основной вид ГПМ) с системой управления 3. Накопитель заготовок 5 в виде поддона размещен рядом со станком. Для загрузки-разгрузки заготовок робот перемещается по порталу, а схват робота в вертикальном направлении.