Курсовая работа: Анализ системы управления
3) значение сигнала после скачка YK=70.
График ступенчатого входного воздействия приводится на рисунке 4.2.

Рисунок 4.2 – График входного сигнала
График переходного процесса показан на рисунке 4.3.
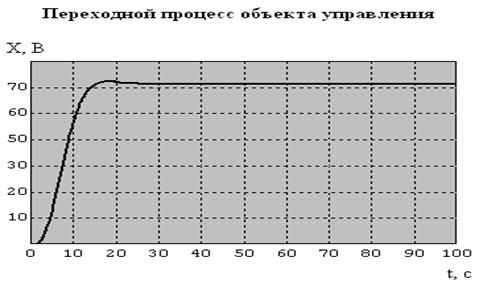
Рисунок 4.3 - Переходной процесс, протекающий в объекте управления объекта управления
Исходя из рисунка 4.3, можно провести анализ динамических свойств объекта управления
Высчитаем перерегулирование переходного процесса объекта управления. Для этого высчитаем максимум данной функции (используем список в МВТУ) и воспользуемся формулой (2).
![]()
Переходной процесс системы не превышает значение ошибки регулирования, значит процесс осуществляется бес перерегулирования.
хуст =70 B,![]() =±3,5 B.
=±3,5 B.
tн = 22,44 c. Достигается при t = хуст .
xmax = 71.16 B. Достигается при t = 18.54 c.
5. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТ ПОСЛЕДОВАТЕЛЬНОГО СОЕДИНЕНИЯ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА И ОБЪЕКТА УПРАВЛЕНИЯ
Для проведения анализа динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c, необходимо в МВТУ смоделировать последовательное соединение объекта управления и исполнительный механизм, добавить временный график для просмотра поведения переходных процессов на каждом шаге интегрирования. Наглядное представление показано на рисунке 5.1.
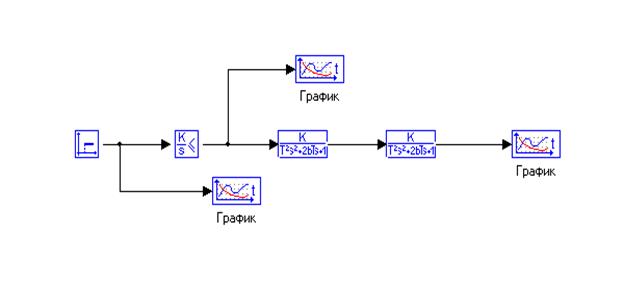
Рисунок 5.1 - Исполнительный механизм и объект управления.
График ступенчатого входного воздействия изображён на рисунке 5.2.
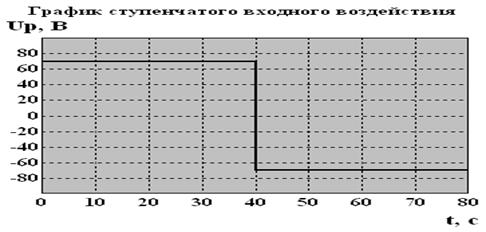
Рисунок 5.2 – График входного сигнала
График сигнала, преобразованного исполнительным механизмом, изображён на рисунке 5.3.

Рисунок 5.3 - График сигнала, преобразованного исполнительным механизмом
График переходного процесса, протекающего в системе управления, изображён на рисунке 5.4.
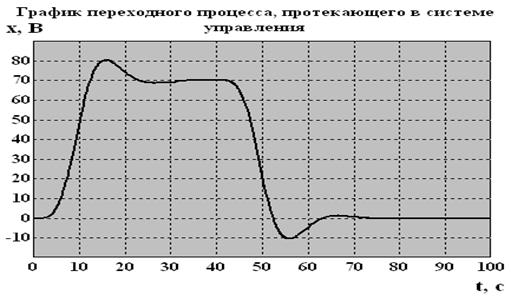
Рисунок 5.4 - График переходного процесса, протекающего в системе управления
Анализ динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c проводится с помощью данных, на основании которых построен график на рисунке 5.4.
На графике можно выделить два периода. Первый – от 0 до 40 с, второй скачок начинается от 40с. Но для анализа системы достаточно проанализировать один (любой) из участков по причине того, что основные параметры периодов будут совпадать.