Курсовая работа: Анализ системы управления
Подставим в апериодическое звено постоянное время равное 1,7 секунды. Посмотрим поведения переходного процесса при таких параметрах:
1.
1) Вектор коэффициентов – 1;
2) Вектор постоянных времени Т, с – 1,7;
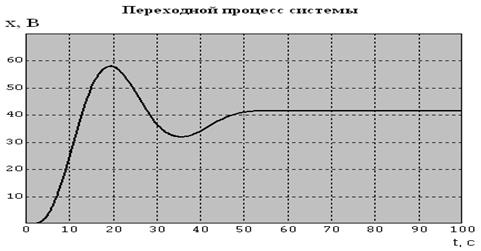
Рисунок 7.5 – График процесса, протекающего в системе
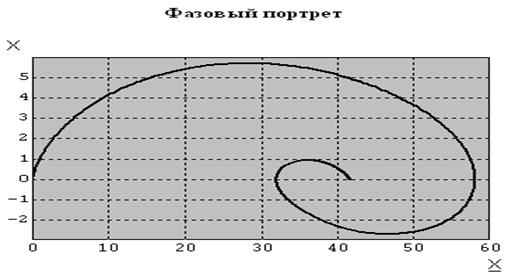
Рисунок 7.6 – Фазовый портрет процессов, протекающих в системе
В переходном режиме качество системы не удовлетворяет требованиям, следовательно, чтоб в замкнутой системе регулирования имели место плавные (без перерегулирования) и быстрые переходные процессы необходимо увеличить коэффициент усиления звена, что понизит колебательный процесс.
2.
1) Вектор коэффициентов – 2;
2) Вектор постоянных времени Т, с – 1,7;
При таких значениях график процесса, протекающего в системе будет выглядеть следующим образом:
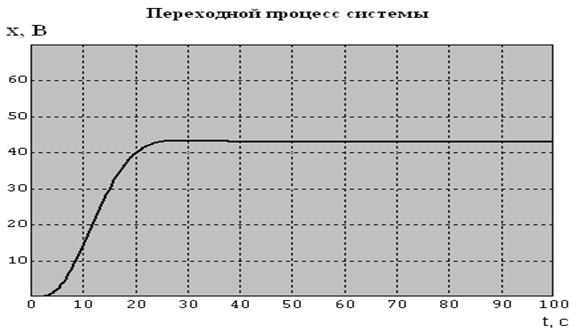
Рисунок 7.8 – График процесса, протекающего в системе
Фазовый портрет процессов представлен на рисунке 7.9

Рисунок 7.9 – Фазовый портрет процессов, протекающих в системе
Анализ графика (рис.7.8) даёт следующие результаты:
хуст =40 B ,![]() =±3,5 B .
=±3,5 B .
t н = 20.55 с. Достигается при t = хуст .
xmax = 41.09 B . Достигается при t = 27.65 c
![]() %, что находится в рамках допустимого.
%, что находится в рамках допустимого.
Таким образом была выбрана структура и численные значения параметров для обеспечения в замкнутой системе регулирования плавных (без перерегулирования) и быстрых переходных процессов, ошибка регулирования не превышает 3.5 В.
Таким образом была выбрана структура и численные значения параметров для обеспечения в замкнутой системе регулирования плавных (без перерегулирования) и быстрых переходных процессов, ошибка регулирования не превышает 3.5 В. Параметры указаны в Таблице 2.
Таблица 2 – Подобранные параметры для звена обратной связи
| Коэффициент усиления | 2 |
| Постоянная времени | 1.7 |
| Вектор начальных условий | 0 |
ВЫВОДЫ
В процессе написания курсовой работы был проведён анализ динамических свойств отдельно объекта управления и системы управления в целом, данных в задании, при помощи программы ПК «МВТУ», позволяющей вести расчёты в системах управления, сконструированных непосредственно в программе.
На базе данной системы управления был сконструирован релейный регулятор, к которому были подобраны параметры, отвечающие требованиям задания, что позволило понять на практике каким образом действуют релейные регуляторы и осуществляется переходной процесс в системе управления.