Курсовая работа: Анализ системы управления
хуст =70 B,![]() =±3,5 B.
=±3,5 B.
tн = 22,44 c. Достигается при t = хуст .
xmax = 79.39 B. Достигается при t = 18.77 c.
Высчитаем перерегулирование:
![]()
Переходной процесс системы превышает значение ошибки регулирования, значит процесс осуществляется с перерегулированием.
6. РАЗРАБОТКА РЕЛЕЙНОГО РЕГУЛЯТОРА
Для конструкции релейного регулятора используется блок «Релейная неоднозначная с зоной нечувствительности». Наглядная схема приведена на рисунке 7.
Значение параметров ступенчатого входного воздействия:
1) Время «включения» скачка t=0;
2) Значение сигнала до скачка Y0=0;
3) Значение сигнала после скачка YK=40;
Значение параметров статической характеристики реле
a1, a2, b1, b2, y1, y2 - -3.5 -3.5 3.5 3.5 -70 70;
Ниже (рисунок 6.1) приведена схема системы с включением блока реле неоднозначное с зонами нечувствительности (выполнена с помощью ПО ПК «МВТУ»).
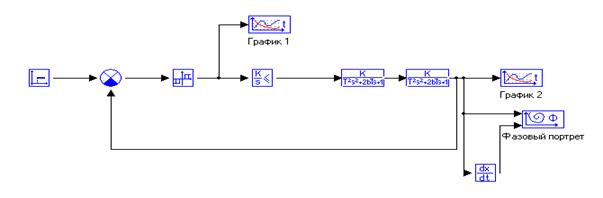
Рисунок 6.1 – Схема системы с включением блока реле
В этом случае график процесса, протекающего в системе, будет выглядеть следующим образом (рисунок 6.2):
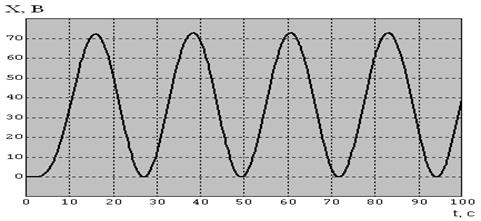
Рисунок 6.2 - График процесса, протекающего в системе при подключении реле
Фазовый портрет представлен на графике (рис. 6.3):
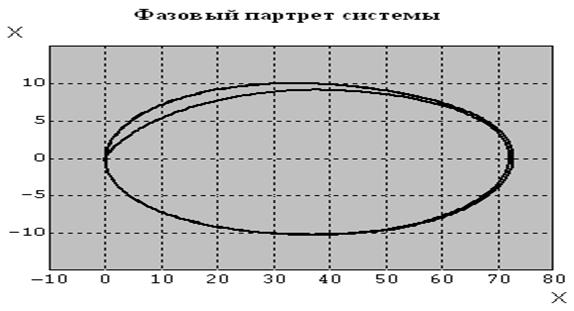
Рисунок 6.3 – Фазовый портрет процесса, протекающего в системе при подключении реле
Как следует из приведённых выше графиков, в системе возникают незатухающие колебания. Амплитуда колебаний зависит от начальных условий и, следовательно, эти колебания являются автоколебаниями. Для устранения колебаний необходимо ввести в систему обратную связь с апериодическим звеном первого порядка и сумматором. Обратная связь необходима для того, чтобы предсказать время отключения реле в момент, когда оно ещё не достигло зоны нечувствительности.
Схема линейного регулятора (выполнена в программе ПК «МВТУ») изображена на рисунке 6.4.
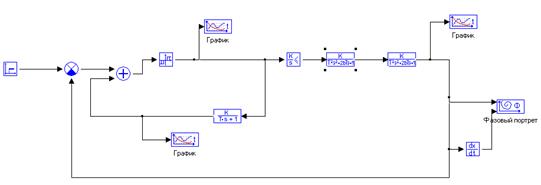
Рисунок 6.4 – Схема релейного регулятора
Таким образом был сконструирован релейный регулятор, обеспечивающий перевод объекта из начального состояния x н =0 в конечное состояние x к =40 В. Теперь можно приступить к оптимизации структуры и подбору численных значений.
7. ВЫБОР СТРУКТУРЫ И ПАРАМЕТРОВ