Курсовая работа: Автоматическая система регулирования промышленного кондиционера
0 0 0.0001 0
0 0 0.0000 0
0 0 0 0.0001
0 0 0 0.0000
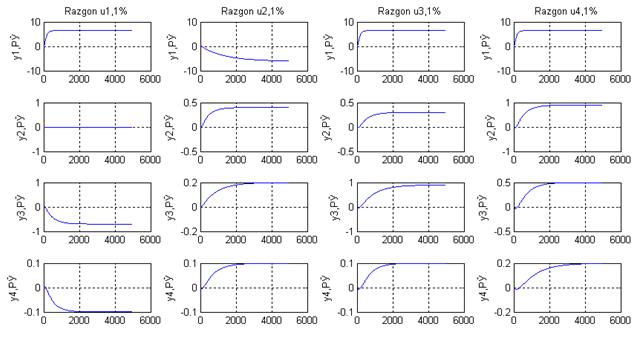 Рисунок. Кривые разгона передаточных функций
Рисунок. Кривые разгона передаточных функций
Если сравнить матрицу передаточных функций и полученные разгонные характеристики(рисунок ), видно, что Кр из матрицы передаточных функций совпадают с Кр на графиках, можно сделать вывод: построение модели и преобразование выполнены верно.
4. Синтез многомерного ПИ-регулятора
Для синтеза ПИ-регулятора полученные матрицы должны быть расширены в матрицы A1, B1, C1:
A1=[Ad zeros(8,2); C eye(2)];
B1=[Bd;zeros(10)];
C1=[C eye(2)];
Матрицы параметров регулятора должны быть рассчитаны с помощью функции dlqr.
K=dlqr(A1,B1,Q,R)
L=dlqr(A1',C1',Q1,R1)'
Расширены матрицы имеют вид:
A1 =
Columns 1 through 12
0.9941 0 0 0 0 0 0 0 0 0 0 0
0.0258 0.9741 0 0 0 0 0 0 0 0 0 0
0.0025 0.1878 0.9048 0 0 0 0 0 0 0 0 0
0 0 0 0.9995 0 0 0 0 0 0 0 0
0 0 0 0.0347 0.9827 0 0 0 0 0 0 0
0 0 0 0 0 0.9941 0 0 0 0 0 0
0 0 0 0 0 0.0258 0.9741 0 0 0 0 0
0 0 0 0 0 -0.0025 -0.1878 0.9048 0 0 0 0
0 0 0 0 0 0 0 0 0.9941 0 0 0
0 0 0 0 0 0 0 0 0.0258 0.9741 0 0
0 0 0 0 0 0 0 0 0.0025 0.1878 0.9048 0
0 0 0 0 0 0 0 0 0 0 0 0.9984