Курсовая работа: Автоматизация технологических процессов колпаковой печи
Расчет управляющего воздействия на ЭВМ производится в дискретные моменты времени. Следовательно, вычисление управляющего воздействия П – регулятора будем производить по следующему алгоритму:
![]() (6.1.2.1)
(6.1.2.1)
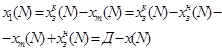
конкретные алгоритмы расчета управляющего воздействия зависят от места приложения возмущающего воздействия. Так при расчете переходных процессов, вызванных возмущениями по нагрузке, ЭВМ вычисляет в дискретные моменты времени координату
![]() (6.1.2.2)
(6.1.2.2)
Координата ![]() представляет собой сигнал ошибки с отрицательным знаком
представляет собой сигнал ошибки с отрицательным знаком
![]() (6.1.2.3)
(6.1.2.3)
Таким образом, при расчете переходных процессов, вызванных возмущениями по нагрузке, управляющее воздействие П-регулятора вычисляют по выражению
![]() (6.1.2.4)
(6.1.2.4)
Расчет переходных процессов в АСУ потребует ввода значения управляющего воздействия регуляторов в начальный (нулевой) момент времени. В этот момент времени, когда к объекту возмущения приложено возмущение по нагрузке, сигнал ошибки отсутствует и управляющее воздействие П-регулятора равно нулю
![]() (6.1.2.5)
(6.1.2.5)
Когда к системе приложено скачкообразное возмущение по заданию, ЭВМ вычисляет отклонение регулируемой координаты от начального заданного значения
![]() (6.1.2.6)
(6.1.2.6)
Так как для расчета переходного процесса в ЭВМ вводится только величина скачкообразного возмущения по заданию
![]() (6.1.2.7)
(6.1.2.7)
то выражение для входной величины регулятора (сигнал ошибки) будет таким
 (6.1.2.8)
(6.1.2.8)
Следовательно, уравнение П-регулятора при расчете переходных процессов, вызванных скачкообразными возмущениями по заданию, приобретает вид
![]() (6.1.2.9)
(6.1.2.9)
В начальный (нулевой) момент времени, когда к регулятору приложено скачкообразное возмущение по заданию, сигнал ошибки определяется выражением (6.2.7). Поэтому в этот момент времени управляющее воздействие П-регулятора равно
![]() (6.1.2.10)
(6.1.2.10)
Теперь остановимся на алгоритмах расчета управляющего воздействия И-регулятора. Запишем уравнение идеального непрерывного И-регулятора
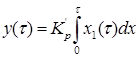 (6.1.2.11)
(6.1.2.11)
где ![]() - коэффициент передачи И-регулятора.
- коэффициент передачи И-регулятора.
Дифференцируя обе части уравнения (6.1.2.11), перейдем к такому уравнению И-регулятора
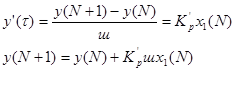 (6.1.2.12)
(6.1.2.12)
С учетом выражения (6.1.2.10) запишем выражение И-регулятора для расчета переходных процессов, вызванных возмущениями по нагрузке :
![]() (6.1.2.13)
(6.1.2.13)
а также с учетом выражения (6.1.2.8) – уравнение И-регулятора для расчета переходных процессов, вызванных скачкообразными возмущениями по заданию:
![]() (6.1.2.14)
(6.1.2.14)