Курсовая работа: Автоматизированный электропривод грузового лифта
базисное сопротивление для силовых цепей:
Rб =Uб/Iб=192,76/42=4,59 Ом
базисное сопротивление для системы регулирования:
R бр =Uбр/Iбр=10/0,5*10-3=20000 Ом
Механическая постоянная времени электропривода зависит от суммарного момента инерции и принятых базисных значений скорости и момента:
![]()
Расчёт параметров силовой части электропривода в относительных единицах.
На рис. 8. показана структурная схема модели силовой части электропривода как объекта управления. Переменные модели выражены в относительных единицах. В модель входят следующие звенья:
- тиристорный преобразователь (ТП) - пропорциональное звено с коэффициентом передачи kП;
- главная цепь (ГЦ) - апериодическое звено с электромагнитной постоянной времени Т3 и коэффициентом передачи, равным ![]() , т.е. эквивалентной проводимости главной цепи в относительных единицах;
, т.е. эквивалентной проводимости главной цепи в относительных единицах;
- механическая часть (МЧ) - интегрирующее звено с механической постоянной времени Tj;
- звенья умножения на магнитный поток ![]() (поток рассматривается в модели как постоянный параметр).
(поток рассматривается в модели как постоянный параметр).
Входные величины модели представляют собой управляющее воздействие UУ (сигнал управления на входе преобразователя) и возмущающее воздействие mC (момент статического сопротивления на валу двигателя).
Переменными модели являются:
- ЭДС преобразователя ed;
- ЭДС якоря двигателя ея;
- ток якоря двигателя iя;
- электромагнитный момент двигателя m;
- угловая скорость двигателя ![]() .
.
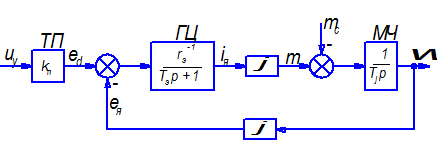
Рис. 8 Структурная схема объекта управления
Определим параметры электропривода в относительных единицах:
- коэффициент передачи преобразователя:
![]()
- эквивалентное сопротивление главной цепи:
![]()
- сопротивление цепи якоря двигателя:
![]()
- магнитный поток двигателя: