Курсовая работа: Электропривод с вентильной машиной
![]()
![]()
![]()
![]()
![]()
![]()


![]()
Рис. 2. Функциональная схема БДПТ и ВМ.
В случае БДПТ на обмотках машины формируется импульсное напряжение (ток), а в случае вентильной машины на выходе СПП формируется синусоидальное или квазисинусоидальное напряжение (ток).
Принцип управления вентильной машиной поясняет рис. 3. Датчик положения ротора (ДПР), преобразователь координат (ПК) и силовой полупроводниковый преобразователь (СПП) совместно формируют на обмотках статора машины напряжения ![]() ,
, ![]() ,
, ![]() таким образом, чтобы результирующий вектор напряжений
таким образом, чтобы результирующий вектор напряжений ![]() всегда был сдвинут на угол
всегда был сдвинут на угол ![]() и неподвижен относительно оси магнитного поля ротора.
и неподвижен относительно оси магнитного поля ротора.

Рис. 3. Физическая модель вентильной машины.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора ![]() , что и создаёт момент на валу машины.
, что и создаёт момент на валу машины.
Ось магнитного поля в синхронной машине принято обозначать ![]() , а перпендикулярную ось – буквой
, а перпендикулярную ось – буквой ![]() (рис. 3). При анализе машины ось
(рис. 3). При анализе машины ось ![]() считается вещественной осью, а ось
считается вещественной осью, а ось ![]() – мнимой.
– мнимой.
Уравнения равновесия ЭДС на обмотках статора в неподвижной системе координат базируются на втором законе Кирхгофа (ротор не имеет обмоток).
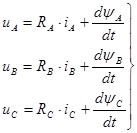 (1)
(1)
где
![]() ,
,
![]() ,
,
![]()
Преобразовав уравнения в мгновенных значениях к уравнениям в пространственных векторах, получим:
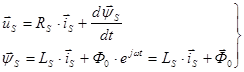 (2)
(2)
где ![]() – индуктивность статора,
– индуктивность статора, ![]() – потокосцепление статора в неподвижной системе координат.
– потокосцепление статора в неподвижной системе координат.
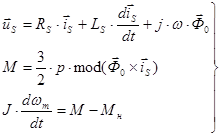
Электромагнитный момент, развиваемый машиной, равен:
![]() (3)
(3)
Уравнение равновесия моментов на валу машины:
![]() (4)
(4)
где ![]() ,
, ![]() – число пар полюсов.
– число пар полюсов.
Модель вентильной машины в неподвижной системе координат
Уравнения машины в неподвижной системе координат находятся на основании уравнений (1 – 4) с учётом того, что ![]() :
:
 (5)
(5)
Разложим уравнения (5) по неподвижным осям.