Курсовая работа: Исследование рабочих процессов в рулевом приводе автомобилей
Отсюда путём интегрирования при известных начальных условиях можно получить выражение зависимости угла поворота УК от смещений в кинематической цепи рулевого привода автомобиля.
Шарниры рулевых тяг, учитывая их количество, являются основными элементами, формирующими смещения в кинематической цепи рулевого привода автомобилей. Это определяет необходимость анализа работ сил трения в них, которые можно определить как разность работ, совершаемой рулевой сошкой и полученной на поворотных рычагах цапф.
При этом элементарная работа определяется:
а) рулевой сошки: ![]() (8)
(8)
б) поворотного рычага: ![]() (9)
(9)
Для определения этих работ необходимо представить моменты на рулевой сошке и поворотном рычаге функциями их углов поворота. С этой целью введём коэффициент пропорциональности нарастания момента относительно угла поворота (то же - усилия в РП относительно смещения в нём), физический смысл которого следует из диаграммы (рис.1) равен:
| (10) |
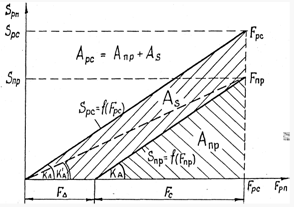
Рис.1. Диаграмма работ: затраченной на рулевой сошке на преодоление необратимых смещений в РП и полученной на поворотном рычаге.
Тогда работа, затраченная на рулевой сошке и полученная на поворотном рычаге цапфы, будет равна, соответственно:
 , , | (11) |
 . . | (12) |
Работа сил трения для обеих половин рулевого привода равна:
| (13) |
Учитывая, что угол поворота рулевой сошки можно выразить:
| (14) |
Выражение (13) может быть приведено к виду:
 | (15) |
Исходя из физических процессов, протекающих в рулевом приводе, разделим всю область смещений в РП и соответствующих им усилий на четыре диапазона согласно диаграмме (рис.2). В первом диапазоне преобладают предварительные смещения, вызванные силами вязкого трения в подвижных сопряжениях РП. Их величина незначительна (до 0,15 мм), они полностью выбираются при усилии 10 Н.
Во втором диапазоне преобладают необратимые смещения, вызванные наличием зазоров в сопряжениях носящие износный характер. Их величина не превышает 1,5-2 мм для технически исправных автомобилей при усилии 30-50 даН, после снятия которого они не компенсируются.
В третьем диапазоне имеют место обратимые смещения, вызванные упругостью элементов РП. Они достигают 8-10 мм при средне эксплуатационных нагрузках в РП не выше 300 даН, после снятия которых они компенсируются. В четвертом диапазоне имеют место только остаточные смещения, вызванные пластическим деформированием деталей и являющиеся критерием прочностных свойств.
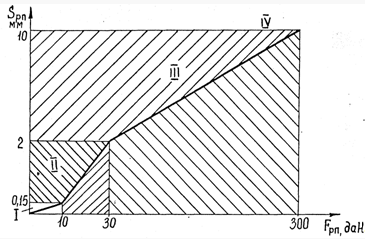
Рис.2. Диаграмма диапазонов усилий и смещений в кинематической цепи РП, вытекающая из физических процессов в рулевом приводе
Таким образом, при условии, что поворот рулевой сошки происходит в пределах смещений в кинематической цепи РП, учитывая принятые ранее допущения, работа, затраченная на преодоление моментов трения в подвижных сопряжениях, зазоров и упругости РП, равна:
 , , | (16) |
Или
 . . | (17) |
Тогда момент сил трения в сопряжениях рулевого привода равен:
 . . | (18) |
Поэтому для рассматриваемого случая поворота рулевой сошки на величину смещений в РП, работа сил трения может быть определена:
| (19) |
что представляет удобство для экспериментальных исследований, в условиях которых коэффициент Ка равен критерию качества РП.
2. Расчёт пути трения и скорости относительного скольжения элементов шарниров рулевых тяг
В настоящее время проблема надежности узлов и систем автомобиля очень актуальна. Надежность рулевого привода является одной из составляющих надежности автомобиля в целом.
Шарнирные соединения рулевых тяг автомобилей являются основным элементами, регламентирующими надёжность рулевого привода [2]. Рабочие процессы в них характеризуются значительным количеством циклов относительного скольжения элементов шарнира. При этом особую важность приобретает фактор, учитывающий переход трения покоя в трение скольжения, когда преодолеваются "точки покоя". Последнее обстоятельство является причиной увеличения интенсивности изнашивания шарнира, несмотря на некоторое её ослабление из-за нестационарности процесса нагружения рулевого привода.
Для автомобилей с независимой передней подвеской нагружение рулевых шарниров определяется тремя факторами: рулевыми воздействиями водителя, колебаниями колёс относительно оси поворотной стойки и колебаниями подвески. При этом скорость движения способствует увеличению интенсивности возбуждений и при возрастании становится фактором, определяющим частоту и амплитуду колебаний колёс.
Из практики технической эксплуатации автомобилей известно, что наибольший износ имеют шарнирные соединения рычагов поворотных цапф и боковых рулевых тяг (крайние рулевые шарниры). Основная причина в том, что эти шарниры соединяют без упругих элементов неподрессоренную массу колёсного узла передней подвески и подрессоренную массу кузова. Это определяет интенсивные динамические нагрузки на элементы шарнира, частично воспринимаемые его пружиной.
Анализируя пространственное скольжение элементов рулевых шарниров, следует отметить, что характеристикой рабочих процессов являются путь трения и скорость относительного скольжения. Используя методику Фоллерта Людера для шарниров автомобилей МАЗ, и рассмотрев дополнительно процесс относительного перемещения элементов шарнира от колебаний подвески для исследуемых моделей, определим суммарный путь трения, отнесённый к площади трения с диаметром, равным диаметру шарового пальца, на 1000 км пробега для автомобилей ВАЗ.
Путь трения в случае имитации процесса основных угловых перемещений управляемых колёс случайной последовательностью, имеющей место от рулевых воздействий водителя, может быть определён:
 , , | (20) |