Курсовая работа: Микропрограммные автоматы
1 P
P
1 k
– операционную часть Y, состоящую из одного или нескольких полей, в каждом записывается номер выходного сигнала yj , вырабатываемого в данном такте;
– адресную часть, состоящую из поля X, в которое записывается номер логического условия Xi (обычно единственного), проверяемого в данном такте;
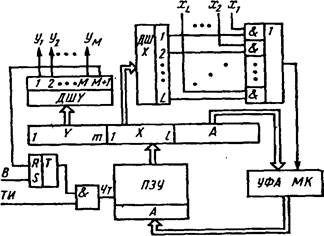
Рисунок 6.Обобщенная структурная схема управляющего автомата, построенного на основе ПЗУ
– а также из поля A, в которое записывается информация об адресе следующей МК;
– служебную часть Р, содержащую вспомогательную управляющую информацию.
Обобщенная структурная схема УА, выполненного на основе ПЗУ, дана на рис. 6.
Перед началом работы на УА подается сигнал СБРОС, устанавливающий все триггеры автомата и регистра микрокоманд (РМК) в нулевое состояние. Этим обеспечивается занесение содержимого нулевой ячейки ПЗУ в РМК при поступлении первого тактового импульса после подачи стартового сигнала В.
С помощью дешифратора ДШУ вырабатывается соответствующий выходной сигнал yj , а с помощью ДШХ определяется номер логического условия Xi , проверяемого в данном такте. В зависимости от значения Xi , прошедшего через схему выбора ЛУ, и информации, поступающей из адресного поля А, устройство формирования адреса следующей МК (УФ АМК) вырабатывает адрес ячейки ПЗУ, содержимое которой будет переписано в РМК в следующем такте. На УФ АМК может также поступать внешний управляющий сигнал V, обеспечивающий, например, выбор определенного алгоритма из тех, чьи микропрограммы хранятся в ПЗУ автомата.
Схема управления СУ (в некоторых вариантах УА она может отсутствовать) разрешает работу ДШУ или ДШХ в зависимости от содержимого служебной части Р формата команд. В последнем такте выполнения микропрограммы на выходе ДШК вырабатывается дополнительный сигнал ум+1, используемый как сигнал F, останавливающий работу автомата и осуществляющий сброс всех его триггеров.
Таким образом, структура УА с хранимой в ПЗУ логикой стандартна, и в этом заключается одно из преимуществ рассматриваемой реализации автомата. Поэтому основные усилия направляются не на получение структурной схемы, а на составление кодированной микропрограммы, которая записывается в ячейки ПЗУ, т.е. центр тяжести при разработке УА смещается с аппаратных на программные средства.
Процедура построения УА с хранимой логикой по имеющейся ГСА заключается в следующем.
1. Выбирают способ адресации и формат микрокоманд, причем стремятся сократить число двоичных разрядов в формате МК, что, как правило, позволяет уменьшить объем оборудования ПЗУ. При этом учитывают реальное быстродействие отдельных узлов УА и необходимость обеспечения заданного быстродействия автомата в целом. При необходимости используют структурные методы повышения быстродействия УА.
2. Производят разметку ГСА в соответствии с правилами, которые определяются выбранным способом адресации.
3. Составляют кодированную микропрограмму в виде таблицы, строки которой соответствуют отметкам на ГСА.
4. Выбирают типы необходимых микросхем и составляют структурную и принципиальную схемы автомата.
Выполнив перечисленные этапы, переходят к технической реализации УА, которая во многом зависит от способа записи информации в используемое ПЗУ.
Рассмотрим особенности выполнения отдельных этапов указанной процедуры.
При построении УА используются главным образом два вида адресации:
а) принудительная (в каждой МК указывается адрес следующей МК);
б) естественная (адрес следующей МК в явном виде указывается лишь в некоторых МК, а в остальных случаях он принимается равным увеличенному на единицу адресу предыдущей микрокоманды).
Формат МК при принудительной адресации может содержать как два адресных поля АО, А1, (рис. 7. а) так и одно АО (рис. 7.б).
|
У 1 m |
X 1 L |
К-во Просмотров: 425
Бесплатно скачать Курсовая работа: Микропрограммные автоматы
|