Курсовая работа: Микропрограммные автоматы
Разметку ГСА осуществляют по правилам, в которых учитывается то обстоятельство, что анализ Xi и выработка сигналов yj происходят теперь в разных тактах: начальная вершина отмечается символом s0 , каждая из остальных вершин получает отличную от других отметку si; каждая вершина, к которой подходит h стрелок, получает дополнительные отметки si j (1=1,2,…, h-1) так, чтобы общее число отметок у этой вершины стало равным h.
При составлении микропрограммы основной отметке каждой операционной вершины ставится в соответствие операционная МК, а основной отметке каждой условной вершины – управляющая МК, реализующая условный переход. Каждой дополнительной отметке si j ставится в соответствие управляющая МК, реализующая безусловный переход в ячейку ПЗУ, соответствующую основной отметке si.
Составление таблицы начинают с отметки s1 и последовательно рассматривают вершины ГСА в направлении стрелок. При проходе через условную вершину сначала двигаются по направлению стрелок, отмеченных нулем (поскольку такому движению соответствует естественная адресация МК). Адресные поля управляющих МК временно остаются незаполненными. Дойдя до конечной отметки, возвращаются вверх по таблице до первой управляющей МК незаполненным адресным полем и записывают в это поле адрес следующей по порядку свободной ячейки. Далее продолжают движение по ГСА от условной вершины, которой соответствует данная управляющая МК, в направлении дуги, отмеченной единицей. Описанную процедуру возвращения вверх по таблице повторяют до заполнения адресных полей всех управляющих МК, обеспечивая тем самым прохождение всех путей на ГСА.
Сравнение рассмотренных трех вариантов реализации УА на основе ПЗУ с принудительной адресацией и двумя адресными полями, с принудительной адресацией и одним адресным полем, с естественной адресацией показывает, что наименьшую разрядность ПЗУ обеспечивает вариант с использованием естественной адресации. При этом время реализации заданного алгоритма оказывается наибольшим, в основном из-за увеличения общего числа выполняемых микрокоманд. Если при выбранном способе адресации объем оборудования построенного УА оказывается чрезмерным или же быстродействие автомата недостаточно, то можно принять некоторые дополнительные меры.
Так, для уменьшения объема ПЗУ находят рациональное разбиение полного множества выходных сигналов yj на подмножества, каждому из которых выделяется свое операционное поле У так, чтобы общее число разрядов операционной части формата МК было наименьшим. Сокращение длины адресной части формата МК можно получить страничной организацией (сегментацией) ПЗУ.
При этом ПЗУ разбивается на сегменты по 2q ячеек в каждом и адрес каждой формируется из двух частей: из адреса (номера) соответствующего сегмента и адреса ячейки в нем. Специальной микрокомандой адрес сегмента, в пределах которого осуществляется работа, записывается в отдельный регистр или счетчик, а в последующих МК указывается лишь адрес ячейки в сегменте.
Основным средством повышения быстродействия УА является организация опережающей выборки микрокоманд, т.е. организация конвейерного режима работы микропрограммного ДУ. При этом процесс выборки и дешифрации следующей МК совмещается во времени с процессом выполнения предыдущей МК в ОА.
Другие возможности повышения быстродействия УА заключаются в параллельной выборке нескольких МК, которые затем обрабатываются в порядке, диктуемом микропрограммой, а также в организации параллельного анализа нескольких логических условий при осуществлении сложных переходов. Однако, эти меры требуют существенного увеличения объема оборудования.
8. Общая структура микропроцессорного вычислительного устройства
При создании современной радиоэлектронной аппаратуры используются три основные подхода к реализации дискретных устройств (ДУ): аппаратный, программный и аппаратно-программный. При аппаратном получают ДУ с традиционной «жесткой» логикой, что обеспечивает наибольшее быстродействие устройств, но требует трудоемкой разработки индивидуальной структуры ДУ.
При программном ДУ реализуется в виде программы для готовой универсальной ЭВМ, в качестве которой можно использовать микроЭВМ, предназначенную для встраивания непосредственно в разрабатываемые блоки.
Аппаратно-программный подход предполагает разработку как программных, так и аппаратных средств. Сюда относится реализация ДУ в виде автомата с микропрограммным управлением и хранимой в ПЗУ программой, а также построение ДУ на основе микропроцессора (МП). Этот вариант открывает широкие возможности для применения современных БИС и позволяет в наибольшей степени согласовать разрабатываемые аппаратно-программные средства с особенностями решаемых задач.
Микропроцессор представляет собой функционально законченное цифровое устройство, выполненное в виде одной или нескольких БИС и предназначенное для выполнения операций по обработке информации и управлению в соответствии с хранимой в памяти программой. Необходимо отметить, что термин «микропроцессор», несмотря на широкое распространение, не имеет строгого определения. Это обусловлено прежде всего наличием большого числа сильно различающихся между собой типов МП, а также их постоянным развитием.
В узком смысле МП совпадает с центральным процессорным элементом (ЦПЭ) вычислительного устройства, выполненным на основе БИС. ЦПЭ обычно используется в качестве основного элемента микропроцессорного вычислительного устройства МПВУ, схема которого представлена на рис. 10.
МПВУ минимальной конфигурации содержит ЦПЭ, блоки ПЗУ и ОЗУ, генератор тактовых импульсов ГТИ и блок интерфейса (ИФ), через который осуществляется связь с внешними устройствами (ВУ). Будем считать, что МПВУ, представляющее собой специализированное вычислительное устройство, используется в аппаратуре для выполнения некоторого заданного алгоритма обработки информации (или совокупности алгоритмов).
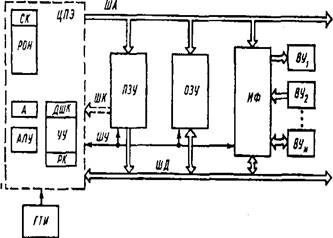
Рисунок 10. Обобщенная структурная схема микропроцессорного вычислительного устройства
Поэтому основная программа работы МПВУ записывается в ПЗУ, которое служит также для хранения различных подпрограмм, констант, таблиц и других данных, известных уже на этапе проектирования устройства. ОЗУ используется для хранения данных, поступивших из ВУ или подготовленных для выдачи в ВУ, а также промежуточных результатов вычислений и некоторой адресной информации.
Блок ГТИ, выполняемый, как правило, на основе кварцевого генератора, предназначен для выработки серий тактовых кварцевого генератора, предназначен для выработки серий тактовых импульсов и некоторых вспомогательных сигналов, необходимых для работы ЦПЭ и синхронизации других блоков системы.
Интерфейс представляет собой совокупность шин для передачи информации, электронных схем, специальных сигналов и алгоритмов, управляющих обменом информации. Блок интерфейса служит для сопряжения сигналов МПВУ и ВУ по временным и электрическим параметрам, а также в необходимых случаях для преобразования данных и управления обменом.
К основным узлам ЦПЭ относятся: управляющее устройство (УУ) с регистром команд (РК) и дешифратором команд (ДШК); арифметико-логическое устройство (АЛУ) с аккумулятором (А), который является основным рабочим регистром; блок регистров общего назначения (РОН) со счетчиком команд (СК).
Связь между блоками МПВУ осуществляется с помощью ряда шин: шины адреса (ША), шины данных (ШД), шины управления (ШУ), шины команд (ШК).
Возможны различные варианты организации шин: используется одна двунаправленная шина данных, либо две одно направленные (одна из которых является входной для ЦПЭ, а другая – выходной), шина команд может совмещаться с шиной данных при обеспечении временного разделения сигналов и т.д.
Обобщенно процесс выполнения команды в МПВУ можно разбить на две фазы: фазу выборки кода команды и фазу ее исполнения. Фаза выборки состоит из трех шагов: сначала адрес команды из СК выставляется на ША, затем происходит выборка кода команды из ПЗУ и передача его через ШК или ШД в регистр команд ЦПЭ, после чего производится дешифрация этого кода в ДШК.
В соответствии с кодом команды УУ начинает вырабатывать последовательность управляющих сигналов, необходимых для ее выполнения. Фаза выполнения команды начинается с подготовки операндов (т.е. обрабатываемых данных), которая заключается в определении местоположения операндов и их размещении в требуемых узлах, после чего ЦПЭ переходит к выполнению операции, заданной кодом команды. В это время в СК формируется адрес следующей команды и вся описанная последовательность работы МПВУ повторяется. Более детально процесс работы МПВУ рассматривается при изучении конкретных серий микропроцессоров.
В зависимости от требований реального применения МПВУ в минимальную конфигурацию системы могут быть введены: контроллер приоритетных прерываний (КПП); контроллер прямого доступа к памяти (КПДП); программируемый параллельный адаптер (интерфейс) ППА); программно-управляемый связной интерфейс (ПСИ); программируемый таймер (ПТ), и т.п.
Блок КПП способствует организации работы МПВУ в реальном времени тем, что дает возможность осуществить временное ВУ, вызвавшего прерывание. Блок КПДП позволяет ускорить обмен массивами данных между ВУ и ЗУ за счет исключения ЦПЭ из цепи передачи информации. Блоки ППИ и ПСИ позволяют организовать обмен между ЦПЭ и В У информацией, представляемой соответственно в параллельном и последовательном кодах. Блок ПТ служит для выработки временных задержек программируемой длительности и меток времени, что способствует организации работы МПВУ в реальном времени.
Для реализации эти