Курсовая работа: Моделирование пуска асинхронного двигателя
Мн = Рн / ωн = 18500/153.546 = 120,485 Н×м
Номинальный ток двигателя определяется из выражения потребляемой мощности:
Р1 =3×Uнф ×Iнф ×cosj.
Потребляемая мощность, в свою очередь равна:
Р1=Рн/h = 3000/0.895 = 20670,39 Вт , тогда
Iнф = Р1 /(3×Uнф ×cosj.) = 20670,39 /(3×220×0.88) = 35,589 A
Номинальное сопротивление двигателя, на которое необходимо умножить активные и индуктивные сопротивления в относительных единицах, чтобы получить параметры двигателя в абсолютных единицах (Ом):
Zн = Uнф / Iнф = 220/35,589 = 6,18 Ом
Пересчитаем параметры Т – образной схемы замещения двигателя из относительных единиц в абсолютные.
Активное сопротивление обмотки статора:
Rs = 0.042×6,18 = 0,2596 Ом
Приведённое активное сопротивление обмотки ротора:
Rr ' = 0.024×6,18 = 0,148358 Ом
Собственная индуктивность статора:
Lσs = Xs /2×π×f1 = 0.085×6,18 /2×π×50 = 0.00167 Гн
Собственная индуктивность ротора:
Lσr = Xr ’ /2×π×f1 = 0.13×6,18/2×π×50 = 0.0025573 Гн
Взаимная индуктивность:
Lm = Xµ /2×π×f1 = 4.3×6,18/2×π×50 = 0.084587 Гн
Индуктивность обмотки статора:
L1 = Lm + Lσs = 0.084587 + 0.00167 = 0.086257 Гн
Индуктивность обмотки ротора:
L2 = Lm + Lσr = 0.084587 + 0.0025573 = 0.0871443 Гн
3. Разработка модели
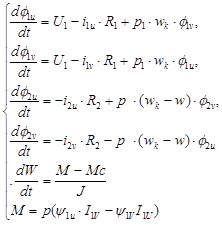
Математическая модель асинхронного двигателя в форме Коши (в системе координат u-v) имеет следующий вид:
Пуск двигателя будем выполнять на холостом ходу, и после выхода АД на синхронную скорость нагрузим номинальным моментом.
Момент инерции привода подобран таким образом, чтобы в динамической кривой скорости вращения двигателя ω (t) не было колебаний при выходе на установившийся режим.
Блок-схема прямого пуска асинхронного двигателя с использованием пакета Power System Blockset
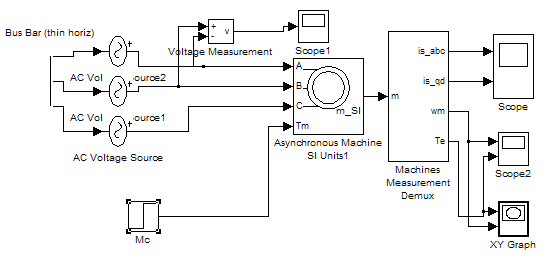
Схема прямого пуска асинхронного двигателя в осях XY .