Курсовая работа: Моделювання процесу надходжень до СОП повідомлень від датчиків і вимірювальних пристроїв
1) кількість заявок, що надійшли до системи;
2) кількість заявок, що була обслугована;
3) кількість втрачених заявок;
4) коефіцієнт завантаженості системи.
В якості оцінок цих показників будемо використовувати статистичні дані, які отримані за результатом n-прогонів імітаційної моделі на інтервалі моделювання.
3 Формальний опис СОП
Наступним етапом для складання імітаційної моделі системи є формальний опис СОП. Формальний опис системи зводиться до опису функціонування системи за допомогою математичних виразів та алгоритмів. Виконаємо математичний опис процесу надходження і обробки повідомлень до СОП, яка працює в системі управління технологічним процесом. При побудові концептуальної моделі ми з’ясували взаємодію елементів СОП при вищевказаному процесі.
|
|
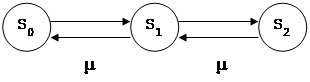 |
Рисунок 2 – Схема функціонування СМО.
Стани СМО:
S0 - канал вільний;
S1 - канал зайнятий (черги немає);
S2 - канал зайнятий (одна заявка знаходиться в черзі).
Оскільки моменти надходження повідомлень від вимірювальних пристроїв підлягають закону рівномірного розподілу, то ми не можемо використати класичні формули розрахунку основних параметрів одно канальної СМО з обмеженою чергою. Виходячи з вищезгаданого перед нами стає необхідність виконання імітаційного моделювання системи для отримання основних характеристик системи.
4 Опис імітаційної моделі СОП
В попередньому розділі процес надходження і обробки інформаційних повідомлень до СОП було представлено у вигляді СМО. Отже, модель розглянутої системи можна вважати дискретно стохастичною.
Для виконання імітаційного моделювання вищевказаного процесу, необхідно змоделювати всі події, які можуть статись, а саме надходження інформаційних повідомлень від датчиків та вимірювальних пристроїв до СОП, зайняття та звільнення пам’яті, втрата повідомлень, якщо вони чекають у буферній пам’яті більше зазначеного терміну та обробка інформаційних повідомлень СОП.
Враховуючи те, що в деякі моменти часу до СОП можуть надходити більше одного інформаційного повідомлення, то для проведення моделювання необхідно застосовувати один із способів квазіпаралелізму.
5 Програмування моделі СОП
Для виконання моделювання довільної системи існує велика кількість різноманітних мов програмування. Їх можна поділити на дві групи:
1) алгоритмічні (С++);
2) спеціальні мови імітаційного моделювання.
Використання універсальних мов програмування в імітаційному моделюванні дозволяє досягнути гнучкості при розробці та використанні моделі, але вважається, що при цьому втрачається великі зусилля на програмування. Вважається краще використовувати спеціалізовані засоби моделювання, які в порівнянні з попередніми (універсальними алгоритмічними мовами), мають наступні переваги:
1) Зменшуються витрати часу на програмування
2) Більш ефективні методи знаходження похибок імітації
3) Меншим записом тих понять, які характеризують процес
імітації
4) Можливість для деякої предметної галузі заздалегідь побудувати стандартні компоненти, які можуть бути використані користувачем при побудові будь-яких імітаційних моделей у цій галузі.
Яскравими представниками спеціалізованих мов програмування – є
такі мови, як NEDIS, GPRS, SIMULA, DINAMO та інші.