Курсовая работа: Обеспечение помехопостановки и помехозащиты технических устройств
![]()
· в закладке «Параметры 1» рис.18 укажем «Мощность передатчика, кВт» - 5, «Коэффициент усиления антенны» - 10000, «Энергетическая дальность, км» - 123, «Разрешение по дальности, м» - 200, «Вероятность правильного обнаружения» - 0,95, «Вероятность ложной тревоги» - 10-6 , «Потери при обработке, дБ» - 3.
· в закладке «Параметры 2» рис. 19 укажем для азимутальной плоскости: «Максимальный угол сканирования, гр.» - 70, «Минимальный угол сканирования, гр.» - (-70), «Разрешение, гр» - 5; для угломестной плоскости: «Максимальный угол сканирования, гр.» - 20, «Минимальный угол сканирования, гр.» - (-20), «Разрешение, гр» - 5; «Время обзора сектора сканирования» - 1,28 с. Расчет числа импульсов в пачке зондирующего сигнала вести, исходя из времени обзора сектора сканирования.
Значения, указанные в закладках «Параметры 1» и «Параметры 2» были выбраны согласно ТЗ и характеристикам БРЛС "БАРС" см. приложение. Теперь программа выполнит расчет параметров РЛС, согласно принятым параметрам, рис. 20.
В программной среде «Стрела» имеется возможность отображения некоторых результатов в виде зависимостей, которые представлены на рис. 21.
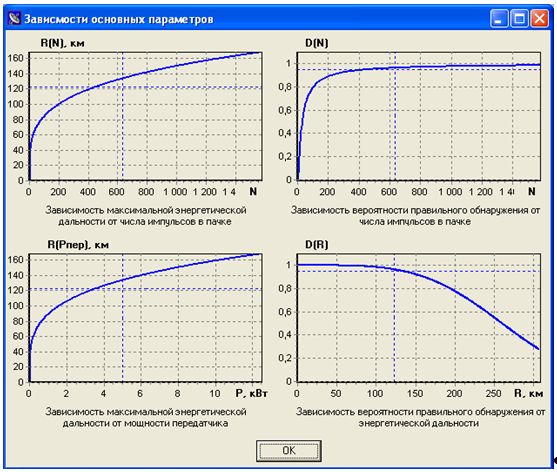
Как видно из рис. 21:
· увеличение числа импульсов в пачке приводит к большему значению энергетической дальности, что можно объяснить непосредственной связью числа импульсов в пачке N с коэффициентом передачи сигнала k с (k с = N ), а последнее связано с энергетической дальностью R , причем чем больше k с , тем больше R [5].
· увеличение N приводит к повышению вероятности правильного обнаружения D , что вполне удовлетворяет теории [5].
· дальность связана с мощностью передатчика основным уравнением дальности радиолокации (как корень четвертой степени), согласно которому увеличение мощности приводит к возрастанию энергетической дальности.
· увеличение энергетической дальности приводит к уменьшению значения правильного обнаружения, связанно данное явление может быть с тем, что на больших дальностях хуже разрешение целей, больше сказывается влияние среды на распространяющуюся волну и многие другие факторы.
Как ранее отмечалось, требуется обеспечить защиту БРЛС от пассивных помех в виде подстилающей поверхности.
Способы оптимальной обработки сигналов в импульсно-доплеровской РЛС
В режиме ВЧП обнаружение сигналов от целей ведется на фоне шума приемника. Отраженный сигнал от цели представляет пачку радиоимпульсов с неизвестной доплеровской частотой, которая подвергается когерентной обработке. Чтобы учесть доплеровский сдвиг частоты, широко используются гребенчатые фильтры, представляющие набор узкополосных фильтров, осуществляющих когерентное накопление.
Ожидаемую пачку импульсов (копию сигнала) u ( t ) можно представить в виде произведения двух колебаний: последовательности видеоимпульсов u 1 ( t ) и высокочастотного колебания u 2 ( t ) несущей частоты f 0 , модулированного огибающей пачки, т.е.
u ( t )= u 1 ( t ) u 2 ( t ),
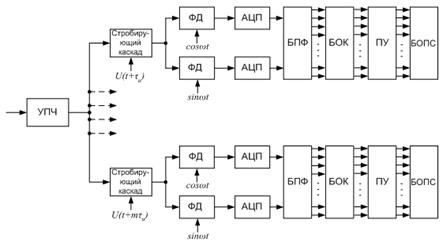
которое соответствует ожидаемому сигналу. Если аддитивную смесь сигнала с шумом на входе приемника обозначить y ( t ), то отклик согласованного фильтра даёт на выходе корреляционный интеграл R :
Откуда вытекает следующий оптимальный алгоритм обработки пачки радиоимпульсов: принимаемая реализация колебаний y ( t ) стробируется. При этом получается колебание u ( t )= u 1 ( t ) u 2 ( t ). Стробирование необходимо осуществлять в соответствии со временем запаздывания сигналов. При неизвестном времени запаздывания необходима многоканальная схема. Каждый временной канал относительно соседнего стробируется импульсной последовательностью, задержанной на длительность одного импульса пачки τи . Тогда число временных каналов m в одном периоде повторения Т определяется m = T /τи и соответствует величине скважности. В каждом канале дальности необходимо осуществить накопление сигналов пачки, т.е. вычислить интеграл. Интегрирование осуществляется узкополосным фильтром.
При неизвестной доплеровской частоте цели в каждом стробируемом канале число доплеровских фильтров должно быть таково, чтобы перекрывать весь диапазон доплеровских частот, который в импульсных системах. благодаря периодичности спектра, можно принять равным F п .
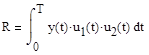
Таким образом, согласованный фильтр обработки имеет структуру, представленную на рис. 22.
Согласованные фильтры одиночного радиоимпульса (СФОИ) стробируются по дальности с числом временных сигналов m . В каждом канале ставятся узкополосные доплеровские фильтры, перекрывающие доплеровский диапазон целей, где производится накопление сигнала. Детектирование огибающей сигнала осуществляется в блоке последетекторной обработки, на выходе которого в пороговом устройстве (ПУ) происходит сравнение с пороговым уровнем с целью обнаружения сигнала. В блоке определения параметра сигнала (БОПС) определяются параметры цели, такие как скорость, дальность и т.д.
При обнаружении цели определяется доплеровская частота цели по номеру доплеровского фильтра и рассчитывается скорость цели:
![]()
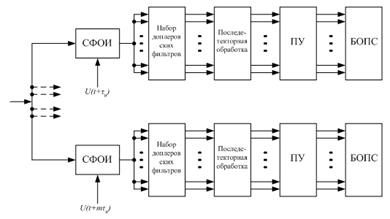
Практически вместо СФОИ лучше использовать усилитель промежуточной частоты (УПЧ), параметры которого согласованны с параметрами сигнала, а узкополосные доплеровские фильтры выполнить в виде блока цифровой обработки, включающего память на всю пачку и обработку на основе быстрого преобразования Фурье (БПФ). Тогда согласованный фильтр имеет структуру, представленную на рис. 23.
Стробирование по дальности выполняется в стробирующих каскадах, подключенных к выходу УПЧ, на которые подаются временные стробы длительностью τи . Количество стробирующих каскадов равно m .
Обработка по частоте Доплера в каждом временном канале производится на видеочастоте, в двух квадратурных каналах, где с помощью фазовых детекторов (ФД) полезная информация из фазы переходит в амплитуду. Для цифровой обработки необходимо информацию с выхода ФД преобразовать в цифровые коды, что выполняется с помощью аналого-цифровых преобразователей (АЦП).