Курсовая работа: Обеспечение помехопостановки и помехозащиты технических устройств
На выходе БПФ образуется n частотных каналов, где n - число импульсов в пачке, отраженной от цели. Полоса пропускания каждого доплеровского фильтра в этом случае будет:
![]()
В БПФ производится когерентное накопление сигнала y ( t ) .Объединение квадратурных каналов производится в блоке объединения квадратур (БОК), причем объединение производится для каждого частотного канала. Обнаружение полезного сигнала происходит на выходах многоканального (n каналов) порогового устройства (ПУ). Дальнейшая обработка в виде фиксации обнаружения и измерения параметров цели производится в блоке определения параметров сигнала (БОПС).
Величина порогового сигнала q на выходе когерентного накопителя:
![]()
Где q вх – отношение напряжения полезного сигнала (uсвх ) к среднеквадратическому значению шума (σшвх ) на входе устройства обработки.
Структура фильтра, представленного на рис. 23, реально в цифровом виде выполняется на одном АЦП и спецпроцессоре с одним БПФ. Многоканальность по времени реализуется за счет разбиения по временным тактам работы АЦП и БПФ.
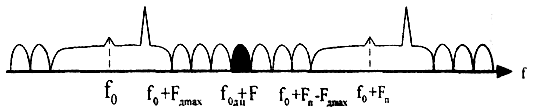
На рис. 24 приведены спектры соседних гармоник, отраженных от пассивных помех, от цели и с учетом частотной характеристики согласованного фильтра, выполненного в виде многоканального доплеровского фильтра, показанного на рис. 22 для режима ВЧП.
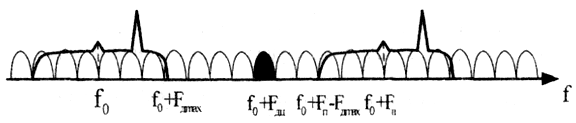
Аналогичный спектр на рис. 25 представлен при выполнении многоканального доплеровского фильтра в виде БПФ, структурная схема которого показана на рис. 23.
Особенность обработки, показанной на рис. 24, состоит в том, что доплеровские фильтры расположены в зоне спектра, свободного от пассивной помехи. При изменении скорости носителя РЛС меняется положение точек f 0 ± F д m ах , что приводит к изменению зоны спектра, свободного от пассивных помех. В этом случае для перекрытия всей зоны спектра, где может находиться полезный сигнал, следует производить адаптивную привязку начала гребенки доплеровских фильтров к скорости носителя РЛС (к точкеf 0 ± F д m ах ).
В случае использования БПФ (рис. 25) по ширине спектра пассивных помех F д m ах рассчитывают количество частотных каналов БПФ, в которых находится помеха, и эти каналы в обнаружении полезного сигнала не участвуют. Из всего анализа можно сделать вывод, что схема рис. 23 хоть и сложнее схемы рис. 22, но обеспечивает лучшие результаты, так как учитывает изменение скорости носителя РЛС (для избавления от пассивной помехи выберу эту схему).
В техническом задании также указана активная помеха (АП) – уводящая по скорости. Такой тип помех используется для обеспечения срыва автосопровождения цели по координатам (дальности, скорости). В отличие от помех типа ложная цель, уводящие помехи динамически изменяют свои параметры, т.е. принимая сигнал от РЛС, они преднамеренно изменяют в нем какой-либо параметр (вносят дополнительную задержку, изменяют фазу и др.), после чего переизлучают его в направлении станции, тем самым, обеспечивается автозахват ложной цели и ее сопровождение. Бороться с такой помехой можно, с помощью следующего алгоритма:
скоростно-пороговый алгоритм заключается в следующем:
![]()
Если равенство выполняется, то параметры дальности R и скорости V согласованы и идет сопровождение цели. Если не выполняется, то это уводящая помеха. Иначе говоря, зная, что скорость есть первая производная от дальности, сравнивая оценку с вычисленной скоростью можно сделать вывод о наличии или отсутствии помехи.
![]() ,где
,где
![]()
Если ΔV=10км/ч – это ложная цель и нужно снять ее с сопровождения. Реализация данного метода будет показана на структурной схеме БРЛС ниже.
Расчет параметров помехопостановщика
Общей задачей применения активной помехи, в нашем случае является сокрытие объекта в некоторой области пространства, уменьшение зоны видимости подавляемой РЛС, уменьшении вероятности правильного обнаружения подавляемой РЛС.
Существует несколько способов реализации такой помехи:
- усиление исходного шумового сигнала;
- формирование активной помехи из самого полезного сигнала.
Остановимся на рассмотрении второго способа.
При постановке активной помехи возможны две ситуации:
- передатчик активных помех расположен непосредственно на прикрываемом объекте (самоприкрытие).
- постановщик активных помех расположен в вынесенной точке пространства.