Курсовая работа: Обработка данных в автоматизированных системах
![]() (Ом)
(Ом)
(1.33)
![]()
(1.34)
| (1.35) |
Так как А = 1, то ![]() , а
, а ![]() .
.
Принимаем :
 |
(1.36) |
В случае, если коэффициент передачи фильтра А>1, то величины R3 и R4 выбираются из условия R4 /R3 = А–1. В качестве ОУ можно выбрать микросхему К140 УД9.
· Расчет нормирующего усилителя:
В качестве нормирующего усилителя выбираем операционный усилитель LM 741:
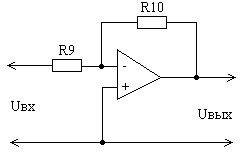
Рисунок 1.6 – Схема нормирующего усилителя
Коэффициент усиления рассчитывается по формуле:
 | (1.37) |
Максимальное значение амплитуды входного сигнала, приемлемое для АЦП, равно ![]() , максимальное значение амплитуды входного сигнала датчика равно
, максимальное значение амплитуды входного сигнала датчика равно ![]() , коэффициент усиления ФНЧ
, коэффициент усиления ФНЧ ![]() , коэффициент усиления ДУ
, коэффициент усиления ДУ ![]() . Тогда
. Тогда
| (1.38) | |
|
| (1.39) |
Выбираем сопротивления: R9=1 кОм, R10=23 кОм.
2. МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
2.1 Описание модели АЦП
Одной из важнейших задач, решаемых автоматизированными системами, является сбор и обработка данных, поступающих от первичных преобразователей (датчиков), установленных на объектах автоматизации. Эти данные рассматривают как временные ряды.
Временной ряд - это множество наблюдений, генерируемых последовательно во времени. В зависимости от того, как изменяется время: непрерывно или дискретно, различают временные ряды непрерывные и дискретные.
Современные автоматизированные системы обрабатывают данные с помощью компьютеров, поэтому все данные, которые поступают в виде аналоговых сигналов, преобразуются в цифровую форму.
При исследовании процесса аналого-цифрового преобразования будут рассматриваться следующие временные ряды:
Х(t) - исходная физическая величина (непрерывный ряд);
х(t) - выходной сигнал датчика в вольтах, соответствующий функции Х(t) (непрерывный ряд);
С(t) - выход х(t) датчика, переведенный в непрерывные отсчёты (непрерывный ряд);
С(iT) - выход х(t) датчика, переведенный в непрерывные отсчёты, выполненные в дискретные моменты времени с периодом Т (дискретный ряд);
с(i) - выход х(t) датчика, переведенный в округленные отсчёты, полученные после операции квантования (дискретный временной ряд);
е(i) - погрешность, равная С(iT) - с(i).
Фиктивный временной ряд С(t) введен здесь только для удобства. Как временной ряд С(t), так и ряд с(i) измеряются в одних единицах - отсчётах. Временной ряд С(t) есть просто результат линейного преобразования функции х(t) вида:
| (2.1) |