Курсовая работа: Организация и технология грузовых работ на транспорте
· разворачивание вручную захватов с кирпичом для установки их на транспортные средства.
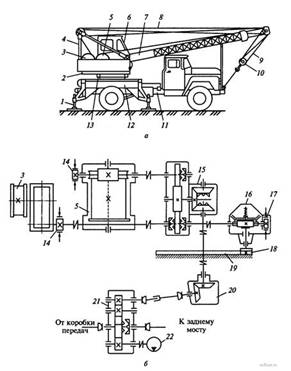
Рис. 1.
2.2 Разгрузка кирпича
· Разгрузку кирпича на поддонах возможно производить грузоподъёмным краном (рис.2), вилочным погрузчиком или краном манипулятором (рис.3), а также возможна разгрузка кирпича с поддонов вручную.
· Работы по разгрузке кирпича на поддонах грузоподъёмным краном разрешается производить только квалифицированному персоналу, прошедшему специальное обучение и аттестацию с участием инспектора Госгортехнадзора.
· При производстве разгрузочных работ грузоподъёмным краном разрешается использовать только испытанные исправные грузозахватные приспособления, соответствующие типу и массе поднимаемого груза.
· Рекомендуется разгружать по одному поддону. При этом для его зацепки использовать текстильные стропы длиной 3,0 м, чтобы исключить повреждение кирпича и поддона.
· Для выхода в кузов необходимо использовать лестницы или специальные площадки.
· Разгрузку вилочным автопогрузчиком рекомендуется производить с обоих бортов.
· Если нет возможности производить разгрузку с обоих бортов, а длина вил погрузчика не позволяет брать поддон с кирпичом на всей ширине кузова с одной стороны, то допускается "подтягивание" поддона к краю кузова при помощи текстильных строп. При этом необходимо убедиться, что на пути перемещения поддона отсутствуют препятствия.
· Разгрузку кирпича вручную рекомендуется производить в перчатках или рукавицах с целью предотвращения повреждения рук.
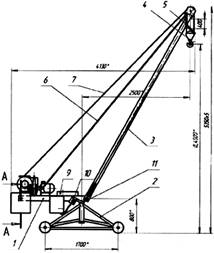
Рис. 2
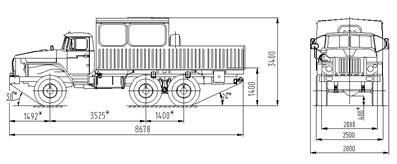
Рис.3
2.3 Конструкция подъёмного крана
Конструкция подъёмного крана включает в себя:
· металлоконструкцию, составляющую основу крана. По сути, все, что мы видим в кране, относится к металлоконструкции — пролёты, опоры, стрелы и т. д. Металлоконструкции бывают коробчатого (на большинстве автокранов и мостовых кранов) и решётчатого сечения (в основном бaшeнныe кpaны). В зависимости от этого меняются условия эксплуатации и надзора, способ производства и расчёты при проектировании. у каждого из этих видов имеются как плюсы, так и минусы. Применение конкретного типа выбирается согласно техническим, технологическим и другим требованиям. Следует отметить, что в принципе эти два вида взаимозаменяемы, но следует оценивать и адекватность их применения к условиям эксплуатации и задачам.
· механизм подъёма груза, состоящий из гибкого подъёмного органа (стального каната или цепи), грузозахватного устройства (крюк, петля, грейфер и т. д.) и грузовой лебёдки. Для обеспечения безопасности в работе грузоподъёмный механизм оснащается различными ограничителями (грузоподъёмности, грузового момента, хода грузозахватного органа);
· грузозахватный орган, может быть не автоматического действия (крюк, петля) или автоматического действия (электромагнит, пневматический присос, спредер и др.).
Также подъёмный кран может быть оснащен механизмами передвижения грузовой тележки, изменения вылета стрелы, вращения несущего элемента вокруг опоры, и т. д. Краны-штабелёры оснащаются механизмом вращения колонны. Все без исключения краны, зарегистрированные в Ростехнадзоре, снабжаются ограничителями грузоподъемности или грузового момента, которые также могут иметь работомеры для сбора информации о поднимаемых грузах.
2.4 Устройство и принцип действия кранов-манипуляторов
Краны-манипуляторы предназначены для подъёма и перемещения грузов при проведении погрузочно-разгрузочных, строительных, монтажных, ремонтных, и других работ.
Основу конструкции кранов-манипуляторов составляют пространственные механизмы со многими степенями свободы. Краны-манипуляторы предназначены для работы в сферах, где применение рабочей силы человека не целесообразно. За сходство во внешнем виде с человеческой рукой, рабочий орган крана-манипулятора (как и любого другого манипулятора) называют механической рукой. Кран-манипулятор состоит из привода, устройства управления, механической руки и устройства-захвата. Управление производится человеком-оператором через пульт управления.
В качестве привода может использоваться ручной (используется при поднятии и перемещении грузов на небольшие расстояния), электрический (на основе двигателя постоянного или переменного тока), гидравлический, пневматический и двигатель внутреннего сгорания. Последний используются в кранах, работающих независимо от электросети в передвижном транспорте.
Управление манипулятором осуществляется дистанционно при помощи пульта управления. Исполнительный орган крана-манипулятора имеет различное строение в зависимости от выполняемых им функций. Рабочим органом может служить схват наподобие кисти руки, кран, электромагнит, и т.п.
3. Описание работы погрузо-разгрузочного пункта железнодорожной станции
Железнодоро́жная ста́нция — объект железнодорожного транспорта, имеющий путевое развитие, позволяющее производить операции по приёму, отправке, скрещению и обгону поездов.