Курсовая работа: Прикладна теорія цифрових автоматів
BEGIN
 |
 |
![]()
![]()
![]()
![]()
![]()
END
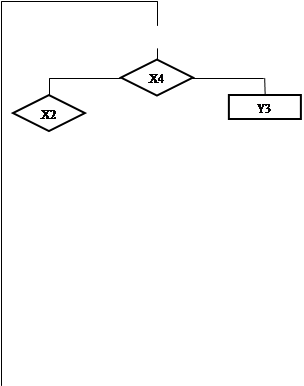
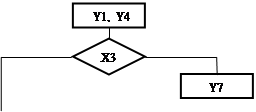
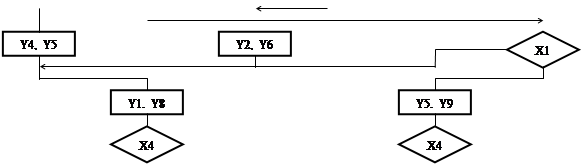
Рис.1.1. Граф-схема алгоритму автомата Мілі
|
BEGIN
 | |
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
END
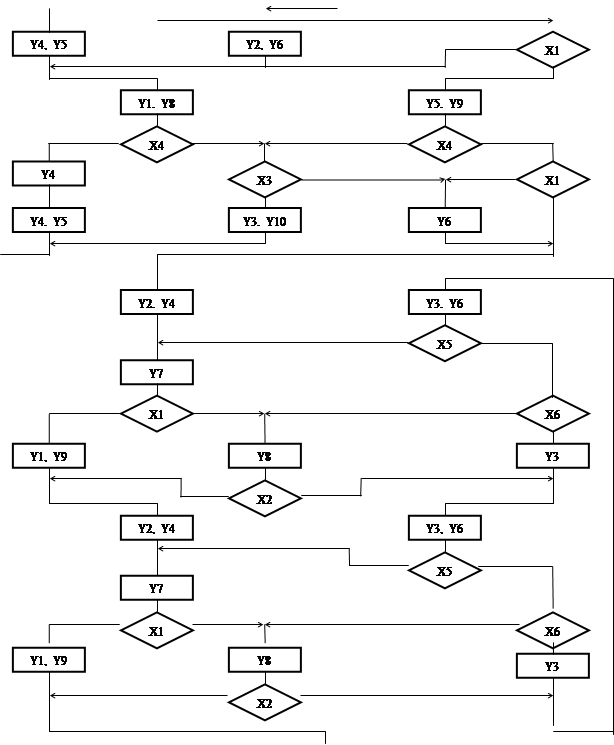
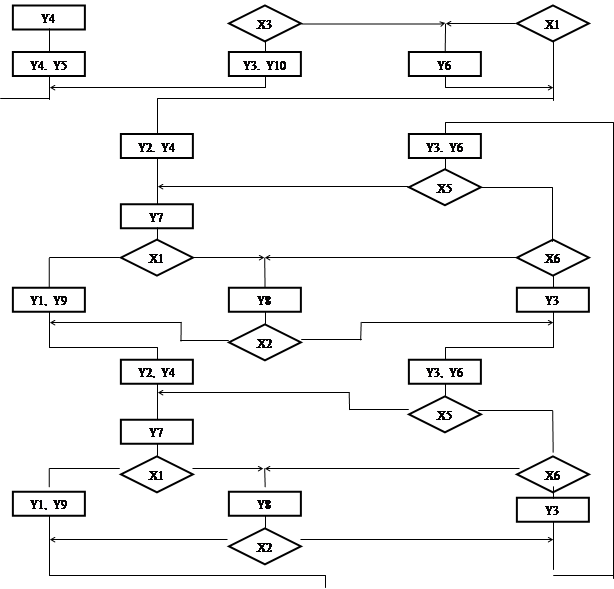
Рис.1.2. Граф-схема алгоритму автомата Мура
1.2. Тип тригера
Тип тригера вибирається за значенням числа A(MOD 3) на підставі табл.2 в методичних вказівках. Згідно з моїм варіантом завдання:
A(MOD 3)=30(MOD 3) =0.
Тому, згідно таблиці 2 у методичних вказівках, тип тригера в моєму завданні для синтезу автомата Мура – D, а для синтезу автомата Мілі – Т.
1.3. Серія інтегральних мікросхем
Серія інтегральних мікросхем для побудови принципових схем синтезованих автоматів для мого варіанта завдання – КР1533.
2. ОСНОВНА ЧАСТИНА
2.1. Структурний синтез автомата Мілі
2.1.1. Розмітка станів ГСА
На етапі одержання відміченої ГСА входи вершин, які слідують за операторними, відмічають символами a1 , a2 , ... за наступними правилами:
1) символом а1 відмічають вхід вершини, яка слідує за початковою, а також вхід кінцевої вершини;
2) входи усіх вершин , які слідують за операторними, повинні бути відмічені;
3) входи різних вершин, за винятком кінцевої, відмічаються різними символами;
4) якщо вхід вершини відмічається, то тільки одним символом.
За ціми правилами в мене вийшло 22 стани (а22 ).
2.1.2. Таблиця переходів автомата
Для кожного стану ai визначаю по ГСА всі шляхи, які ведуть в інші стани і проходять обов’язково тільки через одні операторну вершину. Виняток становить перехід в кінцевий стан (вершину).
Для мікропрограмних автоматів таблиці переходів-виходів будуються у вигляді списку, тому що велика кількість станів. Розрізняють пряму та зворотну таблицю переходів. Зворотна таблиця переходів будується для D-тригера. Для автомата Мілі я буду будувати пряму таблицю переходів.
|
Am Kam as К-во Просмотров: 755
Бесплатно скачать Курсовая работа: Прикладна теорія цифрових автоматів
|