Курсовая работа: Проект системы автоматического управления температуры печи
В результате получили безынерционное звено.
б) Магнитный усилитель описывается дифференциальным уравнением:
T1 + i = k1Uу
Его передаточная функция будет иметь вид:
i(p)(T1p + 1)=k1Uу(p)
W2(p) = = =
В результате было получено инерционное звено.
в) Электрическая печь с нагревательным элементом описывается дифференциальным уравнением:
T0 + = k0i
Его передаточная функция будет иметь вид:
Θ(p)(T0p+1)=k0i(p)
W3(p) = = =
Получили инерционное звено.
г) Термопара описывается дифференциальным уравнением:
T2 + UT = kTθ
Его передаточная функция будет иметь вид:
UT(p)(T2p + 1) = kTθ(p)
W4(p)= = = - инерционное звено.
Алгоритмическая схема САУ представлена на рисунке 4.
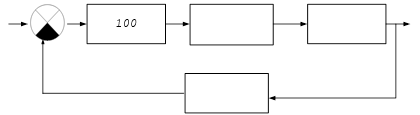
Рисунок 3 - Алгоритмическая схема системы управления температуры печи.
Найдем передаточную функцию разомкнутой системы:
W(p)=W1(p)*W2(p)*W3(p)*W4(p)= =
Найдем передаточную функцию замкнутой системы относительно регулируемой величины по задающему воздействию:
Ф(p)= =
Найдем передаточную функцию замкнутой системы относительно ошибки регулирования по задающему воздействию:
Ф(p)= 1-Ф(p)= =
Передаточную функцию замкнутой системы относительно регулируемой величины по возмущающему воздействию и передаточную функцию замкнутой системы относительно ошибки регулирования по возмущающему воздействию не можем найти, т.к. отсутствует возмущающее воздействие.
3. Анализ устойчивости исходной САУ