Курсовая работа: Проектирование токарно-винторезного станка
![]() м/мин
м/мин
![]() м/мин
м/мин
![]() об/мин
об/мин
![]() об/мин
об/мин
4. Выбор и описание компоновки станка
Компоновка станка в значительной степени влияет на технико-экономические показатели. От компоновки зависит жёсткость конструкции, тепловой баланс и температурная деформация, универсальность станка и его переналаживаемость, металлоёмкость, трудоёмкость изготовления, сборки, ремонтопригодность.
Прототипом проектируемого станка является токарно-винторезный станок модели 1К62, поэтому выбираем аналогичную компоновку проектируемого станка.
Станина станка установлена на передней и задней тумбах, несёт на себе все основные узлы. Слева на станине размещена передняя бабка. В ней имеется коробка скоростей со шпинделем, на переднем конце которого закреплён патрон. Справа установлена задняя бабка. Её можно перемещать вдоль направляющих станины и закреплять в зависимости от длины деталь на требуемое расстояние от передней бабки. Режущий инструмент (резцы) закрепляют в резцедержателе суппорта.
Продольная и поперечная подачи суппорта осуществляется с помощью механизмов, расположенных в фартуке и получающих вращение от ходового вала или ходового винта. Первый используют при точении, второй – при нарезании резьбы. Величину подачи суппорта устанавливают настройкой коробки подач. В нижней части станины имеется корыто, куда собирается стружка и стекает охлаждающая жидкость.
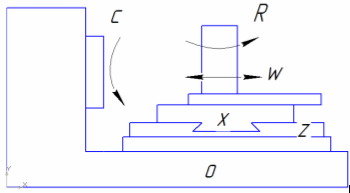
Рис.1 – Схема компоновки токарно-винторезного станка
Для схемы структурная формула имеет вид: COZXWR.
Достоинства: из-за подвижности только одного узла, система обладает высокой жесткостью; обеспечивает высокое качество обработки при небольших скоростях резания.
5. Проектирование и описание кинематической схемы станка
Кинематический расчёт привода главного движения
1. Диапазон регулирования частот вращения шпинделя:

![]()
Число ступеней скорости шпинделя:
![]()
j - знаменатель геометрического ряда частот вращения. Для универсальных станков рекомендуется j=1,26 и j=1,41.
Принимаю j=1,26
![]()
Число ступеней не может быть дробным, поэтому, для обеспечения возможности регулирования скорости вращения во всем диапазоне частот, и принимая во внимание что привод лучше реализовывать используя двух и трех венцовые блоки то принимается z=18.
2. Выбираем стандартный ряд частот вращения:
50; 63; 80; 100; 125; 160; 200; 230; 315; 400; 500; 630; 800; 1000; 1230; 1600; 2000; 2500.
Уточняем значение диапазона регулирования:
![]()
3. Определяем тип структуры привода: