Курсовая работа: Радиолокация как научно-техническое направление в радиотехнике
6. Измерение дальности в импульсной радиолокации
При использовании импульсного метода передатчик излучает очень короткие высокочастотные импульсы через длительные промежутки между ними. Например, длительность импульса 1 мкс, а длительность интервала между импульсами 999 мкс, то есть период 1мс. Условное изображение (не соблюдено соотношение между длительностью и периодом импульсов) излучаемых а) и принимаемых б) импульсов приведено ниже
а)
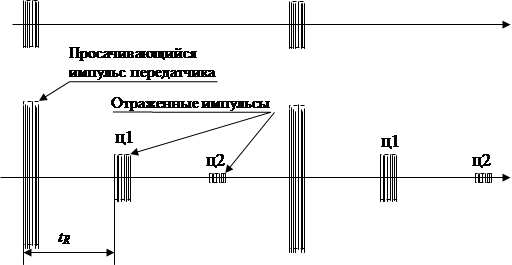
б)
Во время излучения импульса какая-то его часть попадает на вход приемника, несмотря на все меры, принимаемые для предотвращения этого. И пусть это даже очень малая часть, но мощность этого импульса во много раз превышает мощность принимаемых импульсов и обычно на это время приемник запирается. Если в направлении излучения находится цель, то на входе приемника появится отраженный от нее импульс, задержанный относительно излученного на время tR , равное времени распространения радиоимпульса от РЛС до цели и обратно. Если дальность до цели равна R, то радиоволна проходит расстояние 2R и задержка tR = 2R/c.
Если в зону действия луча попадут и другие цели, то от них тоже появятся отраженные импульсы. Чем дальше расположена цель, тем слабее отраженный от нее импульс. Если амплитуда отраженного импульса будет ниже порога чувствительности приемника, то такой сигнал не обнаруживается. Дальность действия РЛС тем больше, чем больше мощность излучаемого импульса и выше чувствительность приемника.
Импульсный метод позволяет легко измерить дальность до цели по задержке отраженного импульса, и не только до одной цели, а для всех, попадающих в зону действия луча. Это значит, что импульсный метод обладает разрешением по дальности. Две цели можно разрешить, то есть воспринять их как две отдельные цели, а не одну протяженную, если отраженные от этих целей импульсы не перекрываются.
Самый простой и очевидный способ измерения дальности – использование осциллографического индикатора типа А.
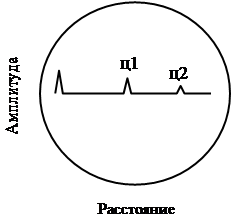 |
В индикаторе типа А используется линейная развертка по горизонтали, которая начинается в момент излучения импульсов передатчиком и заканчивается перед излучением следующего импульса. По вертикали луч отклоняется сигналом с выхода приемника. Величина отклонения пропорциональна величине сигнала. Вертикальное отклонение, соответствующее импульсу передатчика, возникает в начале линии развертки, а отраженные сигналы, похожие по форме, но меньшей величины, появляются через время, пропорциональное расстоянию до каждого отражающего объекта. Так как развертка линейна, то горизонтальную шкалу можно проградуировать в единицах дальности, например, в километрах.
Как мы уже говорили, несовпадение по времени работы передатчика и приемника позволяет использовать одну и ту же антенну для передачи и приема. Для этого используется переключающее устройство, которое подсоединяет антенну к передатчику, когда надо излучать импульсы, и к приемнику во время интервала между импульсами передатчика. В состав этого устройства входит газовый разрядник, разряд в котором блокирует вход приемника.
Заметим, что длительность излучаемого импульса определяет то время, в течение которого приемник не может вести прием отраженных импульсов, так как он блокирован мощным импульсом передатчика. Поэтому отраженные импульсы от близких целей, возвращающиеся уже в то время, когда еще не закончился импульс передатчика, не могут быть воспроизведены на экране индикатора. Таким образом, длительность импульса определяет минимальную дальность действия станции, называемую также мертвой зоной.
Частота повторения импульсов определяет максимальную однозначно измеряемую дальность действия РЛС. Чтобы пояснить это, возьмем частоту повторения импульсов в 2 раза больше, чем на рассмотренном ранее рисунке. (Внимательно сравните эти рисунки).
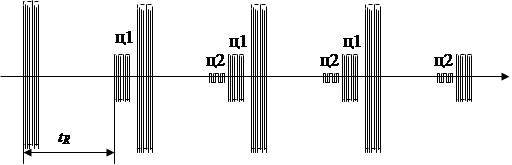 |
При высокой частоте повторения отраженный импульс от дальней цели ц2 придет не в первый промежуток между импульсами, а в последующий. Осциллограмма на индикаторе изменится.
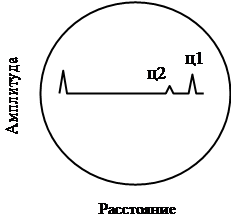 |
Дальняя цель ц2 воспринимается теперь как ближняя. Измеренная величина запаздывания для нее будет на период следования импульсов меньше истинного. Поэтому для однозначного измерения дальности период повторения импульсов должен быть больше, чем максимально возможная задержка отраженного импульса, видимого на экране
7. РЛС обнаружения и РЛС слежения
Задача РЛС обнаружения – обнаружить все цели, находящиеся в зоне обзора и определить их координаты с невысокой точностью. Задача РЛС слежения – обеспечить измерение координат выбранной цели с высокой точностью.
В типовой РЛС обнаружения обеспечивается круговой поиск по азимуту. Отсчет координат целей (азимут и дальность) производится по индикатору кругового обзора (ИКО). Структурная схема РЛС обнаружения приведена ниже
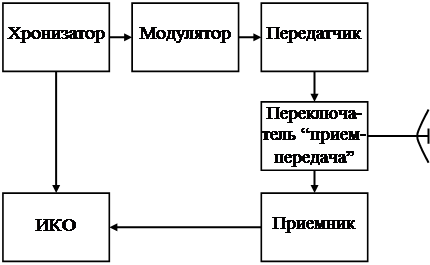 |
Передатчик генерирует последовательность коротких высокочастотных импульсов. Он управляется импульсами модулятора, длительность и частота повторения которых задаются хронизатором. Хронизатор также формирует импульсы для запуска развертки индикатора кругового обзора, совпадающие по времени с излучаемыми импульсами. Отраженные импульсы усиливаются и детектируются в приемнике и подаются далее на ИКО для управления яркостью луча. В ИКО используется радиальная развертка, вращающаяся синхронно с вращением антенны.
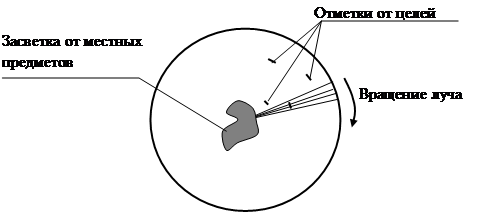 |
Движение луча начинается с центра экрана и заканчивается у края трубки. Центр экрана соответствует нулевой дальности, т.е. расположению радиолокатора, а край – максимальной просматриваемой дальности. Для индикации цели используется яркостная отметка. Другими словами, если в индикаторе типа А появление отраженного импульса приводит к отклонению луча от прямой линии, то в ИКО во время прихода импульса увеличивается яркость свечения луча.
Так как луч совершает полный оборот за сравнительно большое время, равное периоду вращения антенны (несколько секунд), то используется трубка с длительным послесвечением. При каждом проходе вращающегося луча на одном и том же расстоянии от центра экрана появляются яркостные отметки от цели. Количество отметок равно количеству импульсов в пачке. За счет послесвечения эти отметки сливаются и образуют дужку, по центру которой определяется азимут цели.
РЛС слежения в годы Второй мировой войны назывались станциями орудийной наводки. Они обеспечивали высокоточное измерение координат цели, подлежащей уничтожению, и были связаны через прибор управления зенитным огнем (ПУАЗО) с зенитной батареей. В первых станциях орудийной наводки типа английской GL-Mk-II и американской AN/TPS-3 использовалось ручное сопровождение цели. В последующих (GL-Mk-III, SCR-545, SCR-584/784 и др.) сопровождение цели осуществлялось автоматически с использованием конического сканирования луча,
В этих РЛС пеленгация цели осуществлялась по равносигнальному направлению
 |
Пеленгацию по равносигнальному направлению можно реализовать различными способами. Можно взять две антенны с пересекающимися диаграммами направленности (рис а), подсоединить их к приемникам и сравнивать выходные сигналы приемников U1 и U2 , Если U1 > U2 , то цель отклонилась влево от равносигнального направления, если U1 < U2 , то – вправо, а если U1 = U2 , то цель находится точно на равносигнальном направлении.
Можно взять один приемник и подключать его поочередно к антеннам с диаграммами направленности 1 и 2. Тогда выходное напряжение будет неизменным, если цель находится на равносигнальном направлении, или иметь форму меандра, если направление на цель не совпадает с равносигнальным направлением. Причем при изменении стороны отклонения меандр будет переворачиваться (фаза изменяется на 180о ).
Так реализуется измеритель отклонения направления на цель от равносигнального направления. Измеренное отклонение можно использовать для разворота антенной системы так, чтобы равносигнальное направление приближалось к направлению на цель. Но так как цель перемещается по азимуту и углу места, т.е. по двум взаимно перпендикулярным направлениям, то нужно иметь еще пару антенн с пересекающимися диаграммами направленности в плоскости, перпендикулярной рассмотренной. В 60-е годы сделают РЛС сопровождения с антенной системой, формирующей четыре пересекающихся диаграммы направленности и назовут ее моноимпульсной.
Но в 40-е годы (во время второй мировой войны) нашли другое решение: использовали круговое вращение диаграммы направленности. Это эквивалентно поочередному подключению к приемнику одну за другой четырех антенн с пересекающимися диаграммами направленности, только вместо ступенчатого перехода диаграммы направленности из одного положения в другое этот переход стал плавным. Конструктивно такое вращение осуществлялось просто. Станции орудийной наводки работали в СВЧ диапазоне, и антенна представляла собой параболоид вращения, в фокальной плоскости которого располагался излучатель – полуволновый вибратор или рупор. Если этот излучатель сместить относительно оси параболоида, то максимум излучения антенны не будет совпадать с осью антенны, что поясняется рисунком ниже.
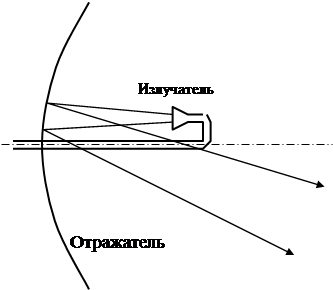 |
Если теперь вращать излучатель, то будет вращаться диаграмма направленности при неподвижном отражателе. РЛС слежения, в которых производится вращение диаграммы направленности, называются РЛС с коническим сканированием. Сменившие их через четверть века РЛС с одновременным сравнением четырех диаграмм направленности стали называться моноимпульсными РЛС.
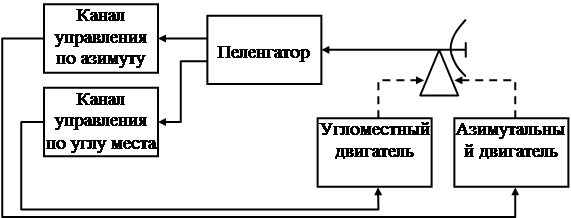
Структура системы управления антенной РЛС слежения приведена ниже
 |