Курсовая работа: Рамочный датчик угла
1.2 Конструкция индукционного датчика угла с подвижной катушкой
Схемы рамочных датчиков имеют различные конструктивные варианты. Конструкция датчика определяется в первую очередь назначением, во вторую – конструкцией прибора в целом.
Основными величинами, характеризующими работу датчика угла, являются:
а) потребляемые мощность и ток при номинальных значениях напряжения возбуждения и частоты сети;
б) рабочий диапазон угла поворота;
в) крутизна выходной характеристики;
г) степень линейности выходного напряжения в зависимости от угла поворота ротора;
д) симметрия выходного напряжения в зависимости от изменения знака угла;
е) остаточная э.д.с. в нулевом положении;
ж) выходное сопротивление датчика;
и) значение реактивного момента.
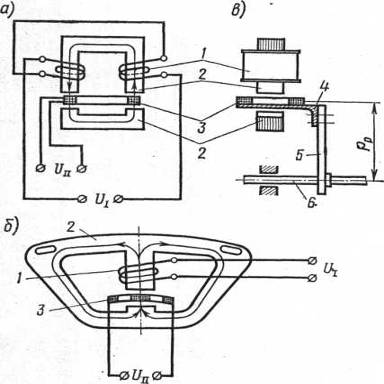
Индукционный датчик с подвижной катушкой представляет собой дифференциальный трансформатор с воздушным зазором, вторичная (сигнальная) обмотка которого располагается в воздушном зазоре. Существует две схемы рамочных датчиков. На рисунке 1, а представлена схема рамочного датчика, дифференциального по потоку, а на рисунке 1, б - схема датчика, дифференциального по э. д. с.
В обеих схемах (рисунок 1, а и б) катушки возбуждения 1 располагаются на полюсах магнитопровода 2 и питаются переменным напряжением. В воздушных зазорах магнитопроводов располагаются плоские сигнальные катушки 3, которые крепятся на специальных кронштейнах 4 (рисунок 1, в), жестко связанных с помощью рычага 5 с осью 6, угол поворота которой требуется измерить.
При поворотах оси прибора сигнальная катушка (рамка) перемещается в зазоре магнитопровода перпендикулярно магнитным силовым линиям потока возбуждения.
 |
Элементы рамочных датчиков имеют следующее конструктивное решение: катушки — плоские, прямоугольной или круглой формы; обмотка катушек выполняется медным проводом, диаметром порядка 0,03…0,05 мм (для сигнальных катушек) и 0,08…0,12 мм (для катушек возбуждения). Катушки возбуждения крепятся на специальном плоском кронштейне, который часто выполняется из пластмассы и имеет на своей поверхности углубления для размещения катушек. Катушки укрепляются на кронштейне с помощью клея или лака. В другой модификации сигнальные катушки укладываются в специальные формы и заливаются синтетической смолой. После застывания смолы получается монолитная деталь. Кронштейн с сигнальными катушками крепится к рычагу обычно винтами.
Магнитопровод датчика набирается из листов электротехнической стали или пермаллоя. Магнитопровод обычно укрепляется на корпусе прибора, рамка — на оси чувствительного элемента. Крепление магнитопровода должно предусматривать возможность регулировки его углового положения. В некоторых гироскопических приборах магнитопровод крепится на подвижном элементе прибора. Это делается для сокращения числа токоподводов к подвижному узлу прибора, так как катушки возбуждения датчика могут быть подключены параллельно со статорными обмотками гиромотора, следовательно, дополнительных токоподводов не требуется. Однако в этом случае, кроме заметного возрастания момента инерции гироузла, возможно появление дополнительных моментов тяжения вокруг выходной оси прибора, обусловленных наличием в конструкции чувствительного элемента значительных ферромагнитных масс.
1.3 Принцип действия индукционного датчика угла с подвижной катушкой
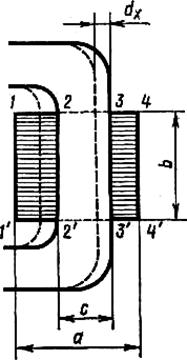
Рассмотрим принцип работы рамочного датчика, дифференциального по потоку [1]. На рисунке 2 представлен вид сверху на правую сторону сигнальной катушки и торец правого полюса нижней части магнитопровода датчика. Для простоты объяснения принципа работы магнитные потоки выпучивания учитывать не будем. В центральном (нулевом) положении рамки датчика часть потока возбуждения (первая), которая пронизывает площадь 1, 2, 2', 1', сцепляется со всеми витками сигнальной катушки, часть потока, которая пронизывает тело намотки, т. е. площадь 2, 3, 3', 2' (вторая), сцепляется лишь с частью витков. Часть потока, пронизывающая площадь 3, 4, 4', 3', совсем не сцепляется с витками сигнальной катушки.
 |
??????? 2 - ? ????????? ???????? ???????? ??????? ? ????????? ????????
В сигнальной катушке э. д. с. индуцируют только первая и вторая части потока. В левой половине сигнальной катушки (см. рисунок 1, а ) поток возбуждения распределяется аналогично. Разница состоит лишь в том, что поток в левой половине катушки имеет направление, противоположное направлению потока в правой части.
При центральном положении сигнальной катушки э. д. с, наводимые в ней левой и правой ветвями потока возбуждения, будут равны по величине и противоположны по направлению. Результирующее выходное напряжение датчика; в этом случае равно нулю.
При смещении сигнальной катушки, например, влево (см. рисунок 2), часть потока правого полюса, которая совсем не сцеплялась с витками сигнальной катушки, увеличивается, а часть потока, которая полностью сцеплялась, уменьшается. Следовательно, э. д. с, наводимая правой ветвью потока возбуждения, уменьшится. Картина перекрытия левого полюса рамкой будет обратной: та часть потока левого полюса, которая совсем не сцеплялась с витками сигнальной катушки, уменьшается, а которая сцеплялась полностью - увеличивается. Если рамка не выходит при своем смещении за пределы полюса, то потокосцепление той части потока, которая пронизывала рамку, останется неизменным. Следовательно, э. д. с, наводимая левой ветвью потока возбуждения, увеличится. В результате с сигнальной катушки будет сниматься напряжение ![]()
![]() , пропорциональное линейной величине смещения рамки
, пропорциональное линейной величине смещения рамки
x = ρβ.
Существенным недостатком рамочного датчика дифференциального по потоку является сильное влияние на его выходной сигнал внешних переменных магнитных полей. Это влияние выражается в увеличении нулевого сигнала и в изменении крутизны характеристики датчика. Значительно меньше подвержен влиянию внешних магнитных полей рамочный датчик, дифференциальный по э. д. с. (см. рисунок 1, б ). В этом датчике одна и та же ветвь потока возбуждения пронизывает две плоские сигнальные катушки, которые смонтированы рядом на одном кронштейне и включены последовательно, встречно.
При подаче питания на обмотку возбуждения в магнитопроводе статора возникает пульсирующий магнитный поток. Этот поток, пересекая воздушный зазор между явно выраженными полюсами, делится на две части на противоположной стороне. Пересекая воздушный зазор и размещённые в нём сигнальные катушки, пульсирующий магнитный поток индуцирует в них э. д. с. ![]() и
и ![]() , имеющие в зависимости от положения ротора относительно статора различную величину и так как сигнальные обмотки включены магнитовстречно, то и разные знаки.
, имеющие в зависимости от положения ротора относительно статора различную величину и так как сигнальные обмотки включены магнитовстречно, то и разные знаки.
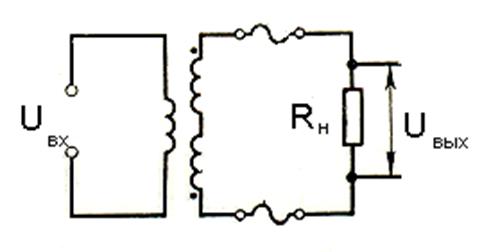
Рис 3 - Схема включения
Поэтому при центральном положении ротора относительно статора суммарная э. д. с. в этих катушках будет равна нулю, так как э. д. с. ![]() и
и ![]() будут одинаковы по величине, но различны по знаку. При отклонении кронштейна с сигнальными катушками от центрального положения потокосцепление одной из двух сигнальных катушек будет больше, чем другой, и суммарная э. д. с. не будет равна нулю как э. д. с.
будут одинаковы по величине, но различны по знаку. При отклонении кронштейна с сигнальными катушками от центрального положения потокосцепление одной из двух сигнальных катушек будет больше, чем другой, и суммарная э. д. с. не будет равна нулю как э. д. с. ![]() и
и ![]() не будут одинаковы по величине. А поскольку сигнальные обмотки замкнуты на нагрузку, то по электрической цепи потечёт ток, пропорциональный величине нагрузки и суммарной э. д. с. Вследствие этого с сигнальных катушек снимается результирующее напряжение
не будут одинаковы по величине. А поскольку сигнальные обмотки замкнуты на нагрузку, то по электрической цепи потечёт ток, пропорциональный величине нагрузки и суммарной э. д. с. Вследствие этого с сигнальных катушек снимается результирующее напряжение ![]()
![]()
![]()
![]() .
.
1.4 Вывод формул для определения величины и крутизны выходного сигнала