Курсовая работа: Рамочный датчик угла
Выходное напряжение датчика
U1I =E1 -E2 , (1)
где ![]() и Е2 — э. д. с, наведенные соответственно в левой и правой сигнальных катушках.
и Е2 — э. д. с, наведенные соответственно в левой и правой сигнальных катушках.
Определим величины ![]() и Е2 , предположив, что сигнальные катушки имеют прямоугольную форму, а кронштейн с сигнальными катушками повернулся по часовой стрелке на малый угол β так, что линейное перемещение рамки слева направо составляет величину ρβ (см. рисунок 4).
и Е2 , предположив, что сигнальные катушки имеют прямоугольную форму, а кронштейн с сигнальными катушками повернулся по часовой стрелке на малый угол β так, что линейное перемещение рамки слева направо составляет величину ρβ (см. рисунок 4).
Рассмотрим контур dx, находящийся на расстоянии х от торца полюса. Поток, пронизывающий этот контур, равен:
Фх = В Sx, (2)
где B= ![]() ab — индукция в зазоре; Sx =bx — площадь, заполненная потоком
ab — индукция в зазоре; Sx =bx — площадь, заполненная потоком ![]() .
.
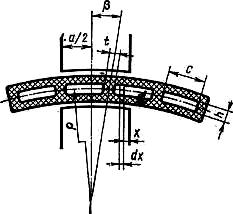
Рисунок 4 - К выводу аналитического выражения характеристики датчика с подвижной катушкой
Подставляя значения В и Sx в (2), получаем
![]() (3)
(3)
Число витков сигнальной катушки, содержащихся в контуре dx, равно:
wdx =![]() , (4)
, (4)
где k3 — коэффициент заполнения окна сигнальной катушки; h — толщина сигнальной катушки; q — сечение провода сигнальной катушки.
Элементарная э.д.с, наводимая в контуре dx, равна:
![]() πf
πf![]() (5)
(5)
Подставляя (3) и (4) в (5), получим
![]() πfФ
πfФ![]()
![]() xdx
xdx
Интегрируя выражение dE2 , получим
![]() 2 πf
2 πf![]() (
(![]() ρβ)
ρβ)![]() (6)
(6)
Аналогично определяется величина:
![]() πf
πf ![]() (
(![]() ρβ)
ρβ)![]() (7)
(7)
Потоки выпучивания также наводят э.д.с. в сигнальных катушках. Обозначив эти э.д.с. через Е1в и Е2в , получим:
 (8)
(8)
Точно рассчитать э.д.с. Е1в и Е2в трудно, так как сложно точно учесть распределение и интенсивность потоков выпучивания. Ввиду меньшей интенсивности потоков выпучивания по сравнению с рабочим потоком приближенно считаем:
Е1в ![]() Е2в (9)
Е2в (9)
Подставляя (7) и (8) в (9), а последнее,с учетом приближенного равенства (10) в (1), получаем
-U![]() = 2 πf
= 2 πf ![]() ρ(a-t)β (10)
ρ(a-t)β (10)