Курсовая работа: Расчет и моделирование цифрового фильтра
Выполнил: Резунов А.Б. гр. 3580
Проверил: Сетин А.И.
Санкт-Петербург 2009
Содержание
Введение
Общие сведения по КИХ-фильтрам
Расчет цифрового фильтра
Модель цифрового фильтра и описание блоков модели
Моделирование работы цифрового фильтра в MatLab
Введение
С физической точки зрения цифровая фильтрация – это выделение в определенном частотном диапазоне с помощью цифровых методов полезного сигнала на фоне мешающих помех (рис. 1).
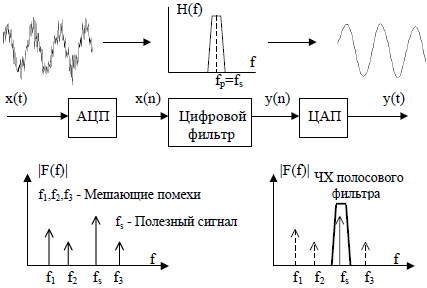
Рис. 1 Фильтрация помех с помощью цифрового ПФ.
По своим частотным свойствам фильтры делятся на:
– фильтры нижних частот (ФНЧ) – Low pass – рис.2а;
– фильтры верхних частот (ФВЧ) – High pass – рис.2б;
– полосовые фильтры (ПФ) – Band pass – рис.2в;
– режекторные фильтры (РФ) – Band stop – рис.2г.
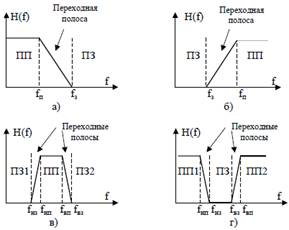
Рис. 2 Идеальные частотные характеристики фильтров.
На рис. 2 приняты следующие обозначения:
ПП – полоса пропускания – частотная область, внутри которой сигналы проходят через фильтр практически без затухания;
ПЗ – полоса задерживания – выбирается разработчиком такой, чтобы обеспечить затухание сигнала не хуже заданного;
Переходная полоса – частотная область между ПП и ПЗ (характеризуется скоростью спада, обычно выражается в дБ/декаду);
fп - частота среза полосы пропускания – точка на уровне 3дБ;
fз - частота среза полосы задерживания – определяется уровнем пульсаций ЧХ в ПЗ;
fнп , fвп – нижняя и верхняя частоты среза полосы пропускания;
fнз , fвз – нижняя и верхняя частоты среза полосы задерживания.
Частота среза в этом случае является условной границей между частотой среза полосы пропускания и частотой среза полосы задерживания.
АЧХ реальных фильтров (рис. 3, на примере ФНЧ) имеют пульсации в полосе пропускания δп и задерживания δз (нестабильность ЧХ в ПП и ПЗ). Часто в литературе они имеют другое название:
Rз – максимальное подавление в полосе задерживания, дБ;
Rп – минимальное подавление в полосе пропускания, дБ.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--