Курсовая работа: Расчет и проектирование приводной станции
Быстроходная ступень с косозубым зацеплением
тихоходная ступень с прямозубым зацеплением
Сила тяги, Fk = 8kH;
Скорость, V = 0,21 м/с;
Длительность работы (ресурс), Lh = 18000час;
Режим работы, 2;
Тип производства – средняя серия
Введение
Привод грузоподъемной машины был сконструирован для передачи крутящего момента на барабан, который обеспечивает поднятие груза со скоростью 0,21 м/с.
Привод грузоподъемной машины (рис. 2) состоит из электродвигателя, редуктора, барабана, троса. Электродвигатель и барабан присоединены к редуктору при помощи муфт. Подъем груза осуществляется тросом, который наматывается на барабан. Барабан приводится в движение от электродвигателя через редуктор и муфты. Редуктор осуществляет повышение крутящего момента и снижение частоты вращения до требуемой величины.
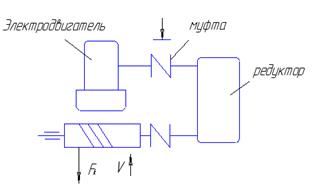
рис. 2. Схема привода барабана
Редуктор состоит из быстроходной шевронной передачи и тихоходной прямозубой передачи. Смазка зубчатых колес и подшипников осуществляется разбрызгиванием.
Для корпуса редуктора была применена современная конструкция. Все выступающие элементы устранены с наружных поверхностей и введены внутрь. Лапы под фундаментальные болты не выступают за габариты корпуса. Проушины для подъема и транспортировки редуктора отлиты заодно с корпусом.
Для удобства сборки корпус выполнен с разъемом. Плоскость разъема проходит через оси валов.
1. Выбор электродвигателя
Определим мощность и частоту вращения.
Потребляемую мощность привода (мощность на выходе) определим по формуле [2]:
Рвых = Ft*V = 8*10 ³*0,21 = 1680 Вт.
Определим потребную мощность электродвигателя [2]:
Рэ.потр = Рвых/ηобщ,
где ηобщ = ηб* ηозп* ηред* ηм.
Здесь ηб = 0,95 – КПД барабана;
ηозп = 0,94 – КПД открытой зубчатой передачи;
ηред = ηп ³* ηззп ³= 0,99 ³*0,97 ³ = 0,886 – КПД редуктора;
ηм = 0,98 – КПД муфты.
Получаем:
Рэ.потр = 1680/0,95*0,94*0,886*0,98 = 2,17 кВт;
Определим частоту вращения барабана [2]: