Курсовая работа: Расчет реверсивного электропривода
ВВЕДЕНИЕ
В замкнутых, а иногда и в разомкнутых структурах автоматизированного электропривода в настоящее время преимущественное развитие получили полупроводниковые преобразователи постоянного и переменного тока. В отличие от машинных преобразователей выходные напряжения полупроводниковых преобразователей характеризуются дискретностью, что может оказать влияние на характеристики электромеханических процессов двигателя. Однако это влияние при малых интервалах дискретности выходного напряжения преобразователя оказываются незначительным. Поэтому в расчетной практике в стадии начального проектирования обычно полагают, что выходные напряжения преобразователей с полупроводниковыми элементами описываются гладкими функциями времени. В последующих исследованиях динамики и статики системы управления электроприводом, полученной в результате проектирования, может быть учтено влияние дискретности выходных напряжений на переходные и установившиеся режимы работы электропривода.
Обобщенная структура электропривода показана на рис. 1.
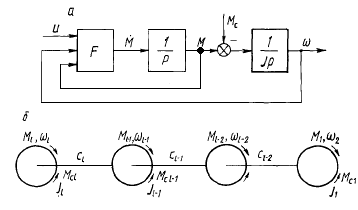
Рисунок 1. Обобщённая структура электропривода.
Уравнения электропривода в случае жесткой механической передачи от двигателя к рабочему органу имеют вид:
![]() = М - Mc ;
= М - Mc ;
![]() = F(u, ω, M),
= F(u, ω, M),
где J- момент инерции; М, Мс — моменты двигателя и сопротивления; ω — угловая скорость вала; u — управляющий сигнал на входе преобразователя, от которого получает напряжение двигатель. Функция F(u, ω, M) отражает динамические свойства привода, который обычно является нелинейным звеном.
Достоинствами полупроводниковых преобразователей являются широкие функциональные возможности управления процессом преобразования электроэнергии, высокие быстродействие и коэффициент полезного действия, большие сроки службы, удобство и простота обслуживания при эксплуатации, широкие возможности по реализации защит, сигнализации, диагностирования и тестирования как самого ЭП, так и технологического оборудования, возможность программирования и перепрограммирования работы микропроцессорных средств управления в случае их использования.
Вместе с тем для этих преобразователей характерны и определенные недостатки. К ним относятся высокая чувствительность полупроводниковых приборов к перегрузкам по току и напряжению и скорости их изменения; низкая помехозащищенность, искажение синусоидальной формы тока и напряжения сети.
Преобразователь — это электротехническое устройство, преобразующее электроэнергию одних параметров или показателей качества в электроэнергию с другими значениями параметров или показателей качества. Параметрами электрической энергии считаются род тока и напряжения, их частота, число фаз, фаза напряжения.
По характеру преобразования электроэнергии силовые преобразователи делятся на выпрямители, инверторы, преобразователи частоты, регуляторы напряжения переменного и постоянного тока, преобразователи числа фаз напряжения переменного тока. По элементной базе (видам применяемых силовых приборов) преобразователи могут быть диодными, тиристорными и транзисторными, а по управляемости — неуправляемыми и управляемыми. В управляемых преобразователях выходные переменные — напряжение, ток, частота могут регулироваться.
1. ВЫБОР СИЛОВОЙ СХЕМЫ РТП
Реверсивные электроприводы выполняются с одной (рис. 1.1, а, б) и двумя (рис. 1.1, в, г, д) вентильными группами. В приводах где допустимое время реверса составляет 0,5 – 2,5 с, возможно применение схемы с реверсом в цепи возбуждения (рис. 1.1, а). Недостаток этой схемы – малое быстродействие вследствие большой постоянной времени цепи возбуждения двигателя. Для приводов, где допустимо «мёртвое» время около 0,1 с и более, можно использовать схему тиристорного электропривода с реверсом в цепи якоря (рис. 1.1, б).
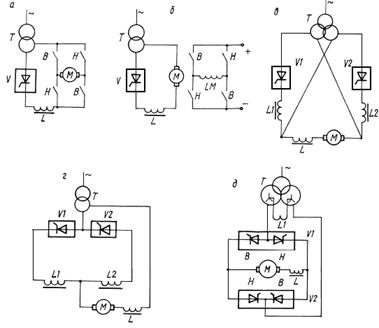
Рисунок 1.1. Виды реверсивных схем.
Для быстродействующих систем управления применяют схемы с двумя вентильными группами: встречно-паралельного включения вентильных групп V1 и V2 , каждая из которых питается от отдельной вторичной обмотке трансформатора Т.: в практике эта схема получила название перекрёстной (рис. 1.1, в) встречно-паралельного включения вентильных групп V1 и V2 с питанием от трансформатора Т с одним комплектом вторичных обмоток (рис. 1.1, г); Н – схема, в которой две группы вентилей, обозначенные буквой В и присоединённые к двум комплектам вторичных обмоток трансформатора, обеспечивают полярность выпрямленного напряжения одного звена, а две группы вентилей, обозначенные буквой Н – полярность выпрямленного напряжения другого знака (рис. 1.1, д). На всех схемах L – сглаживающий дроссель, L1 , L2 – уравнительные дроссели.
Исходя из выше сказанного выбираем трёхфазную мостовую схему соединения вентилей в группах тиристорного преобразователя так как она обладает следующими преимуществами над нулевой:
- при одинаковой фазной ЭДС среднее значение выпрямленного напряжения в мостовой схеме в два раза больше;
- частота пульсаций выпрямленного напряжения в два раза выше (300 против 150 Гц), а амплитуда пульсаций меньше;
-при одинаковой мощности нагрузки типовая мощность трансформатора меньше, чем для нулевой;
-индуктивность в цепи переменного тока в мостовой схеме в два раза больше;
-данная схема дает большой диапазон регулирования скорости.
Вентильные группы, входящие в схему реверсивного выпрямителя могут, как указывалось выше, соединяться двумя способами: по перекрестной или встречно-параллельным схемам. Схемы отличаются количеством вторичных обмоток силового трансформатора. Из-за простой конструкции трансформатора отдадим предпочтение схеме со встречно-параллельным соединением тиристоров. Силовая схема трехфазного мостового реверсивного преобразователя с устройствами коммутации и защиты представлена на рис. 1.2. По заданию, в курсовом проекте управление вентильными группами - совместное согласованное. Для ограничения возникающих при этом уравнительных токов используются два ненасыщающихся уравнительных реактора LR1 и LR2.
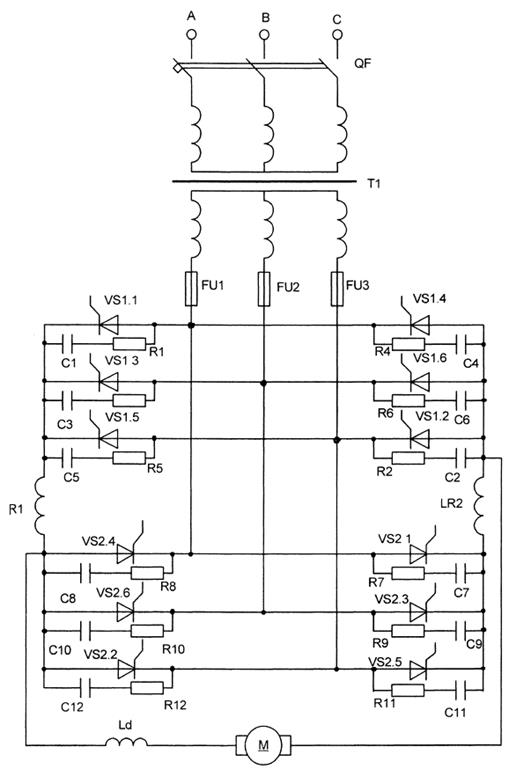
Рисунок 1.2. Электрическая схема трехфазного мостового ТП со встречно-параллельным соединением вентильных групп.
2. Расчёты и выбор элементов силовой схемы
2.1 Расчёт и выбор трансформатора