Курсовая работа: Расчёт закона управления продольным движением самолета
Тогда, полагая ![]() и пренебрегая величиной
и пренебрегая величиной ![]() , с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
, с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
 . (18)
. (18)
В предыдущих выражениях g – ускорение свободного падения, m – масса самолета. При численных расчетах полагаем ![]() м/с2 .
м/с2 .
Из (13) и (14), пренебрегая величиной ![]() , получим формулу для приращения ускорения самолёта по оси подъёмной силы:
, получим формулу для приращения ускорения самолёта по оси подъёмной силы:
![]() . (19)
. (19)
Учитывая (16), получим связь между приращениями нормальной перегрузки и ускорением
![]() . (20)
. (20)
Таким образом, о величине приращения нормальной перегрузки можно судить по показаниям датчика нормального ускорения (акселерометра).
Примем в качестве переменных состояния приращения угла атаки и угловой скорости тангажа. Заменив в правой части уравнения (12) ![]() выражением (15), получим следующие уравнения состояния:
выражением (15), получим следующие уравнения состояния:
![]() , (21)
, (21)
![]() , (22)
, (22)
где угловые величины выражены в градусах, а скорость – м/с.
В таблице приведены числовые данные для коэффициентов линеаризованных уравнений самолета для различных высот и скоростей полета. Вместо воздушной скорости полета V в таблице данных используется относительная скорость
 , (23)
, (23)
где величину M называют числом Маха, ![]() – скорость звука на данной высоте.
– скорость звука на данной высоте.
1.5 Математическая модель привода стабилизатора
Схема электрогидравлического привода руля высоты представлена на рис. 2. Привод представляет собой следящую систему, входной величиной которой является электрический управляющий сигнал, а выходной – перемещение рабочего органа, связанного со стабилизатором (рулём высоты).
На сравнивающее устройство 2 подаются управляющий сигнал 1 и сигнал обратной связи 3, полученный с датчика обратной связи 16. Сигнал рассогласования 4 подаётся на вход электромеханического преобразователя 5. Собственно гидравлический усилитель, составляющий основу привода, является двухкаскадным. Питание первого каскада усиления осуществляется через редуктор 6. Заслонка 7, укрытая защитным колпачком 8, жёстко связана с якорем электромеханического преобразователя. При перемещении заслонки изменяются гидравлические сопротивления сопел 9, через которые непрерывно течёт рабочая жидкость под воздействием небольшого управляющего давления Pу . Переменные сопротивления сопел и постоянные гидравлические сопротивления дросселей 10 образуют гидравлический мост, диагональ которого составляет нагрузка – золотник 11. Поэтому при отклонении заслонки от среднего положения в областях А и Б золотника 11 образуется перепад давлений, создающий движущую силу. Пружины 12 выполняют роль жёсткой механической отрицательной обратной связи. Поршни золотника при постоянном положении заслонки 7 будут перемещаться до тех пор, пока сила пружины не уравновесит движущую силу. Таким образом, перемещение штока золотника пропорционально сигналу рассогласования 4. Смещение штока золотника совместно с закреплёнными на нём поршеньками приоткрывает соответствующий канал для передачи давления источника рабочей жидкости Рб на соответствующую сторону поршня силового цилиндра 13. Стрелками на рисунке показана подача рабочей жидкости высокого давления. В результате шток 14 силового цилиндра перемещается и через кинематическую передачу поворачивает руль высоты 15.
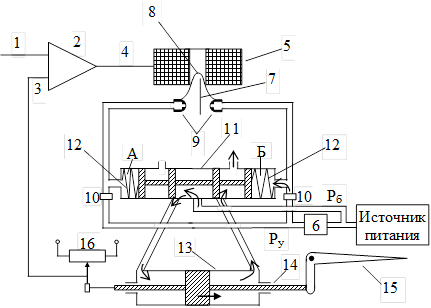
Рис. 2. Схема привода
Структурная схема электрогидравлического привода представлена на рис. 3.
Для пояснения способа получения структурной схемы обратимся к рис. 4, на котором изображено простейшее гидравлическое устройство. В камеру гидравлического устройства поступает жидкость, расход которой регулируется клапаном. (Под расходом жидкости понимается изменение её объема в единицу времени).
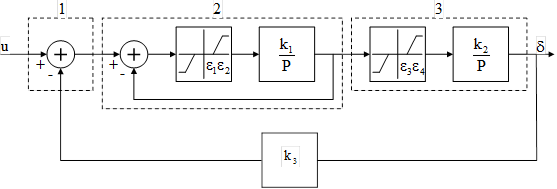
Рис. 3. Структурная схема электрогидравлического привода.
На рис. 3 приняты следующие обозначения: 1 – сравнивающее устройство; 2 – золотник; 3 – силовой механизм.
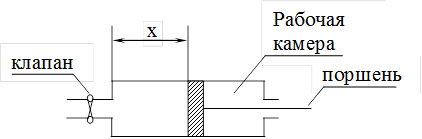
Рис. 4. Гидравлическое устройство
Если полагать, что расход жидкости пропорционален перемещению клапана r, то изменение объема жидкости в рабочей камере также пропорционально величине r. Поэтому скорость перемещения поршня пропорциональна величине r, т.е.
![]() , (24)
, (24)
где k – коэффициент пропорциональности.