Курсовая работа: Расчёт закона управления продольным движением самолета
Нелинейные звенья вводятся для учета сил трения поршня о стенки рабочей камеры золотника и рабочего механизма (начальный участок нелинейной характеристики) и для учета ограничений величин максимальных расходов жидкости (конечный участок нелинейных характеристик).
Для расчетов предлагаются следующие величины числовых данных: ![]() ,
, ![]() ,
,  ,
, ![]()
![]()
![]()
![]() угол наклона нелинейных характеристик равен 450.
угол наклона нелинейных характеристик равен 450.
Максимальные углы отклонения стабилизатора составляют ±300 и достигаются в установившемся режиме при величине входного напряжения ±30 В.
1.6 Математические модели датчиков угловой скорости и перегрузки
Приборы, предназначенные для получения сигналов, пропорциональных угловой скорости самолёта, так называемые датчики угловых скоростей (ДУС), обычно выполняются в виде гироскопа с двумя степенями свободы. С помощью указанных приборов вводится производная в закон регулирования. При этом гироскопические измерители угловой скорости обычно располагают на самолёте таким образом, что оси гироскопа оказываются параллельными соответствующим осям самолёта.
На рис. 5 приведена схема прибора (демпфирующего гироскопа), предназначенного для измерения угловой скорости тангажа.
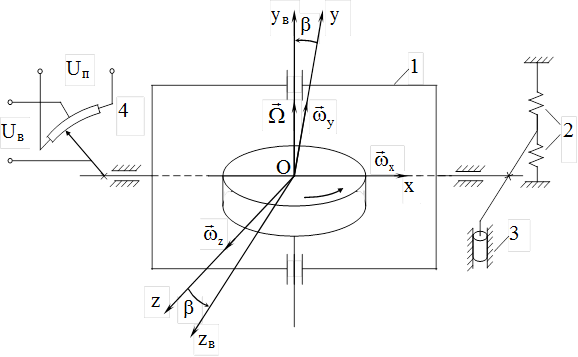 Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик.
Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик.
Ротор гироскопа вращается вокруг оси ![]() с большой угловой скоростью
с большой угловой скоростью ![]() . в этом случае ротор гироскопа обладает большим кинетическим моментом
. в этом случае ротор гироскопа обладает большим кинетическим моментом ![]() , где
, где ![]() – момент инерции ротора гироскопа относительно оси
– момент инерции ротора гироскопа относительно оси ![]() . Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
. Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
![]() *) , (25)
*) , (25)
где первое слагаемое в правой части равенства представляет собой гироскопический момент, Мп – момент пружины, Мд – момент демпфера. Проектируя это уравнение на ось Ox и полагая, что
![]() , (26)
, (26)
![]() , (27)
, (27)
где ![]() – жесткость пружины, f – коэффициент демпфирования, получим
– жесткость пружины, f – коэффициент демпфирования, получим
![]() . (28)
. (28)
Полагая величину ![]() малой, пренебрегая величиной
малой, пренебрегая величиной ![]() по сравнению с
по сравнению с ![]() , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, поскольку величина скорости вращения гироскопа велика, и введя обозначения
 ,
,  ,
,  , (29)
, (29)
получим дифференциальное уравнение второго порядка
![]() . (30)
. (30)
Поскольку электрический сигнал с выхода потенциометрического датчика пропорционален углу ![]() , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
, то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
 . (31)
. (31)
Значения параметров передаточной функции  ,
, ![]() с,
с, ![]() .
.
Для измерения нормальной перегрузки используем осевой акселерометр. Схема осевого акселерометра представлена на рис. 6.

Рис. 6. Схема осевого акселерометра
Акселерометр, иначе называемый датчиком линейных ускорений (ДЛУ), во избежание зависимостей его показаний от угловых скоростей самолёта, устанавливается в центр тяжести самолёта. Его принципиальную схему можно представить в виде винтовой пружины k , один конец которой скреплен с корпусом прибора, а другой с массой ![]() , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
, имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
Если самолёт, несущий ДЛУ, движется с ускорением, причём по оси чувствительности ДЛУ направлена составляющая ![]() этого ускорения, то сумма сил, действующих на массу
этого ускорения, то сумма сил, действующих на массу ![]() , равна
, равна
![]() , (32)
, (32)
или
![]() .*) (33)
.*) (33)
Здесь ![]() - жёсткость пружины,
- жёсткость пружины, ![]() - коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра
- коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра ![]() фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом: