Курсовая работа: Расчетные схемы механической части электропривода
Для исследования отдельных физических особенностей трехмассовая расчетная схема сводится к двухмассовой.
В обобщенной двухмассовой упругой системе (рис.1.2,б) суммарный приведенный момент инерции элементов, жестко связанных с двигателем, аналогично предыдущему обозначен J1 . Суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма, обозначен J2 . Безынерционная упругая связь между этими массами характеризуется приведенной эквивалентной жесткостью с12 . Суммарные моменты нагрузок на валу двигателя и механизма обозначены соответственно Mс1 и Mс2 .
Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих механических связей, поэтому в данном курсе является основным объектом изучения.
Когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, в которых с этим влиянием можно не считаться, механическая часть представляется простейшей расчетной схемой, не учитывающей влияния упругих связей, -жестким приведенным звеном (рис.1.2,в). В этих случаях многомассовая механическая часть электропривода заменяется одной эквивалентной массой с моментом инерции JS , на которую воздействуют электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент нагрузки Mс . Момент нагрузки Мс включает в себя все внешние силы, приложенные к механической системе, кроме момента двигателя M.
При приведении к валу двигателя (w1 =wдв ) суммарный приведенный момент инерции электропривода JS может быть выражен общей формулой

где п и k - число масс установки, совершающих соответственно вращательное и поступательное движение.
Суммарный приведенный к валу двигателя момент статической нагрузки Мс можно в общем виде записать так:
где q, p - число внешних моментов Mс и сил Fj приложенных к системе, кроме электромагнитного момента двигателя.
В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм.
1. Типовые статические нагрузки электропривода
Электромагнитный момент двигателя является выходной величиной для электрической части системы (см. рис.В.2) и входной для механической, поэтому при рассмотрении процессов в системе он выделен из всех действующих на механическую часть внешних моментов. Все остальные силы и моменты определяют статическую нагрузку электропривода Mс . Во всех трех расчетных схемах (рис.1.2) в соответствии с (1.13) эта нагрузка неизменна, так как для двухмассовой системы Mc1 + Мс2 =Mс , а для трехмассовой Mс1 + Мс2 + Mс3 =Mс . Иными словами, при учете упругости суммарная нагрузка неизменна, но уточняется, к каким массам системы приложены отдельные составляющие нагрузки.
Все силы и моменты нагрузки, приложенные к механической части электропривода, делятся на силы и моменты механических потерь и силы и моменты, представляющие полезные нагрузки исполнительного механизма. Для схемы рис 1.1,б в общем виде можно записать
Mc =DMS +Mпол. S (1.14)
где –
 |
суммарный приведенный момент потерь, с учетом момента механических потерь в двигателе; р, q - число моментов и сил в системе, представляющих механические потери, Мпол. S - суммарный приведенный момент полезной нагрузки.
 |
Полезная нагрузка является одним из главных факторов, связывающих электропривод с технологическим процессом приводимого в движение механизма Силы и моменты полезной нагрузки в различных механизмах имеют различный характер Для возможности обобщенного учета их влияния необходимо их классифицировать, выделив ограниченное число типовых нагрузок.
Так как для электропривода имеет важное значение, как зависит момент статической нагрузки от скорости, в дальнейшем используется понятие механической характеристики исполнительного механизма, представляющей собой зависимости Mс =f(w) и w=f(Mс ).
По характеру взаимодействия с электроприводом все силы и моменты делятся на активные и реактивные
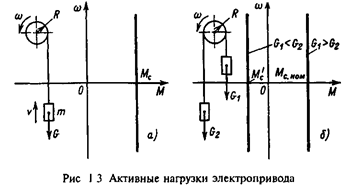
Активными силами и моментами называются силы и моменты, создаваемые внешними по отношению к двигателю источниками механической энергии независимо от движения электропривода, например потенциальной энергией перемещаемых по вертикали грузов, энергией ветра и т.п. На рис.1.3,a упрощенно показан подъемный механизм, нагрузкой которого является приведенный момент силы тяжести груза G:
![]()
где g - ускорение силы тяжести; т - масса груза.
Сила тяжести как при подъеме, так и при спуске груза направлена в одну сторону - в сторону спуска и неизменна по значению. Соответственно механическая характеристика исполнительного механизма w=f(Mс ) в этом случае имеет вид прямой Мс =const (рис.1.3,а). Момент Mс в соответствии с (1.15) зависит от массы поднимаемого или опускаемого груза и может изменяться в пределах от Mс =0 (G=0) до Mс =Мс ном , соответствующего номинальной грузоподъемности (G=Gном ).
Более широкие пределы изменения активной нагрузки характерны для уравновешенных подъемных механизмов. На рис.1.3,б показаны упрощенная схема такого механизма и соответствующие зависимости w=f(Mс ) В данном случае:
M=(G1 -G2 )·R=g·(m-m2 )·R. (1.16)
Очевидно, что в таком механизме при G2 =const знак нагрузки электропривода при данном направлении скорости будет зависеть от массы m1 поднимаемого груза G1 . При m1 =m]HOM МС =МСном> 0, так как G1 >G2 . При том же направлении скорости w>0 в случае m1 =0 знак нагрузки в соответствии с (1.14) изменяется. Физически это означает, что по мере уменьшения массы груза m1 тормозной момент нагрузки электропривода уменьшается, при G1 =G2 становится равным нулю и при дальнейшем уменьшении m1 (G1 >G2 ) двигатель должен перейти в тормозной режим, подтормаживая опускающийся груз G2 , (рис.1.3,б). При изменении знака скорости w<0 (спуск груза G1 ) при m1 =m1ном двигатель должен работать в тормозном режиме, опуская груз G1 , а при m1 =0 - в двигательном режиме, поднимая груз G2 .
Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как реакция на активный движущий момент, развиваемый двигателем, либо любой другой активный движущий момент, например обусловленный силой тяжести или силой инерции. Эти нагрузки всегда действуют в направлении, противоположном движению электропривода, и изменяют свое направление при изменении знака скорости.
Таким образом, все реактивные силы и моменты зависят от скорости. По характеру этой зависимости различают нагрузки типа сухого трения, типа вязкого трения и вентиляторного типа.