Курсовая работа: Разработка регулируемого электропривода механизма с заданным рабочим циклом
Необходимая средняя полезная мощность двигателя:
 | (2) |
Исходя из этих условий выбираем систему ![]() . Основные технико-экономические свойства этой системы приведены в табл. 2.
. Основные технико-экономические свойства этой системы приведены в табл. 2.
Таблица 2. Удельная стоимость электрооборудования, усл. ед./кВт
| Наименование | |||
2. Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Передаточное устройство привода преобразует вращательное движение электродвигателя в поступательное движение исполнительного органа. В современных электроприводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода.
Для электропривода подачи станка выбираем передачу винт-гайка качения. Преимуществами передач винт-гайка качения является: 1) возможность полного устранения зазора в резьбе и создания натяга, обеспечивающего высокую осевую жесткость, 2) низкие потери на трение; к. п. д. этих передач достигает 0.95, 3) почти полная независимость силы трения от скорости и очень малое трение покоя, что обеспечивает равномерность движения.
Кинематическая схема электропривода приведена на рис. 1.
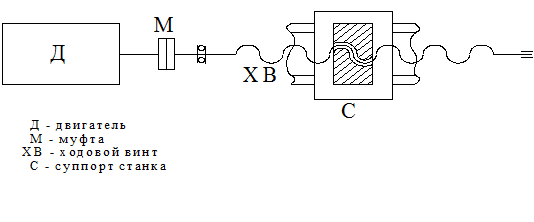
Рис. 1. Кинематическая схема электропривода
Основным параметром при расчёте передачи винт-гайка качения является рабочая часть ходового винта:
| (3) |
По табл. 10 определяем параметры винта, при условии ![]() :
:
Шаг винта определяем из стандартного ряда, учитывая рекомендации:
Исходя из параметров винта по табл. 7 определяем параметры передачи винт-гайка качения с натягом:
К.П.Д. передачи по:
Радиус приведения к валу двигателя по:
| (4) |
Скорость вращения вала двигателя по:
| (5) | |
| (6) |
Приведение скорости рабочего органа к валу двигателя сведено в табл. 3 .
Таблица 3. Скорость рабочего органа и вала двигателя в момент ![]() -ого цикла
-ого цикла
Момент приведённый к валу двигателя по:
| (7) |
Статический момент на валу двигателя:
| (8) |
Момент трения складывается из:
| (9) |
Коэффициент трения в направляющих качения с танкетками примем по:
Сила трения в направляющих:
| (10) |
Момент сопротивления на валу двигателя от силы трения в направляющих:
| (11) |
Момент трения в шариковой паре при наличии предварительного натяга:
| (12) |
Количество подшипников ходового винта:
Внутренний диаметр подшипников табл. 12 [1, стр. 40];
Момент от сил трения в подшипниковой паре при наличии предварительного натяга [4, стр. 457];
| (13) |